National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences, Beijing 100190, China.
School of Artificial Intelligence, University of Chinese Academy of Sciences, Beijing 100049, China.
Sensors (Basel). 2019 Mar 13;19(6):1278. doi: 10.3390/s19061278.
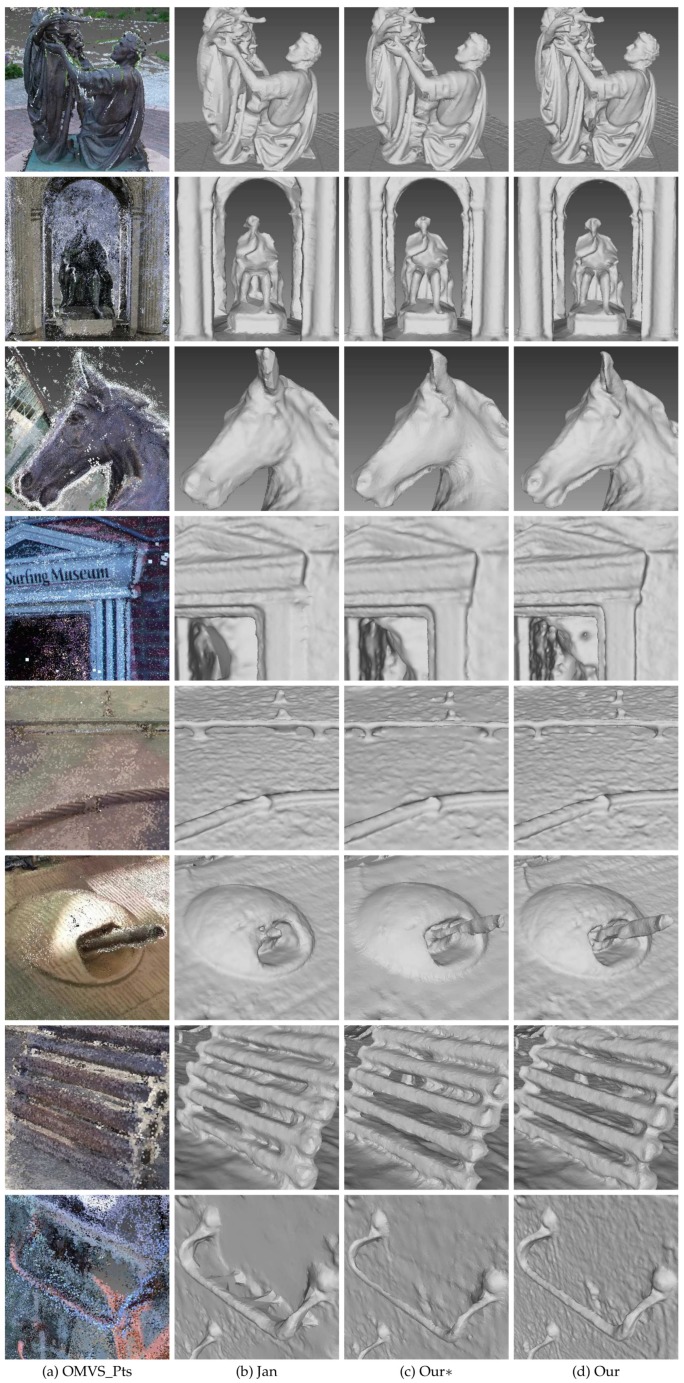
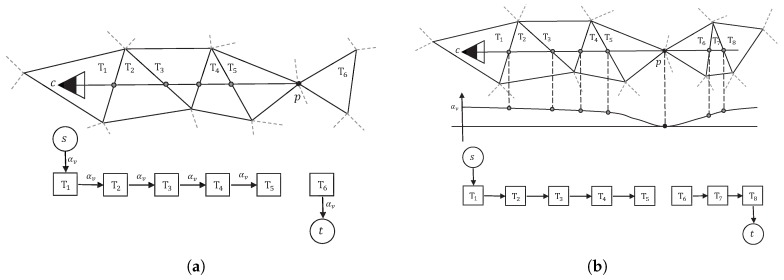
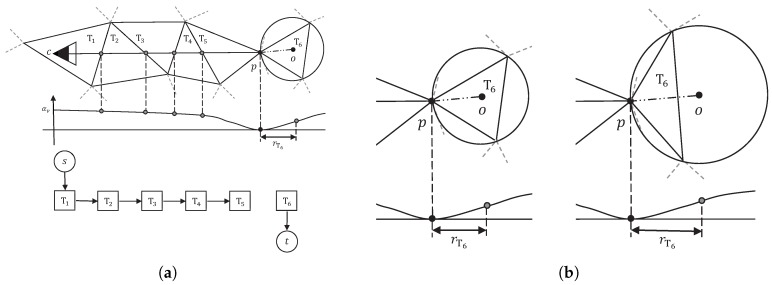
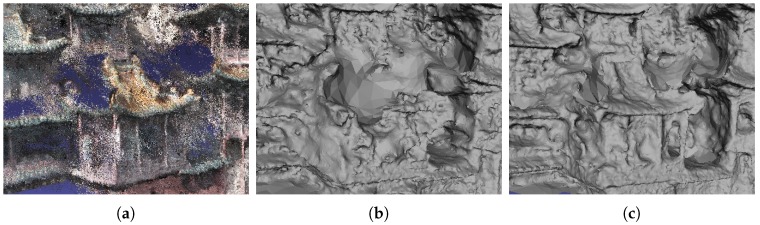
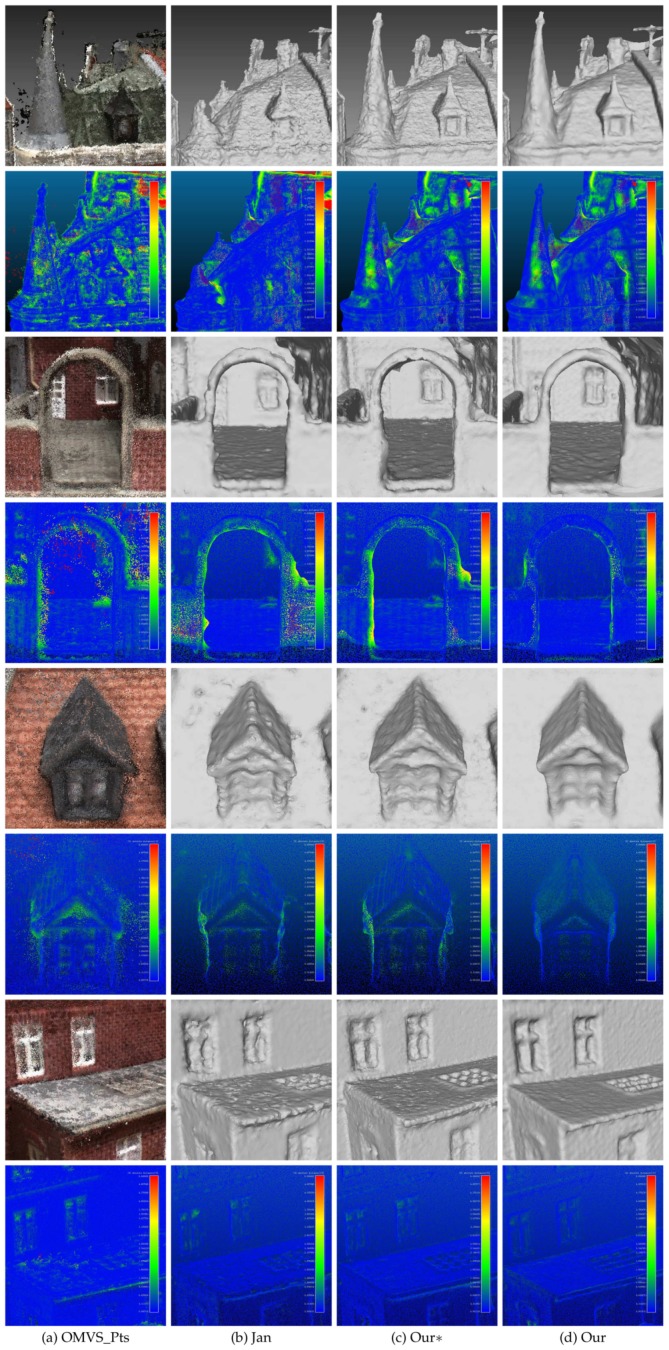
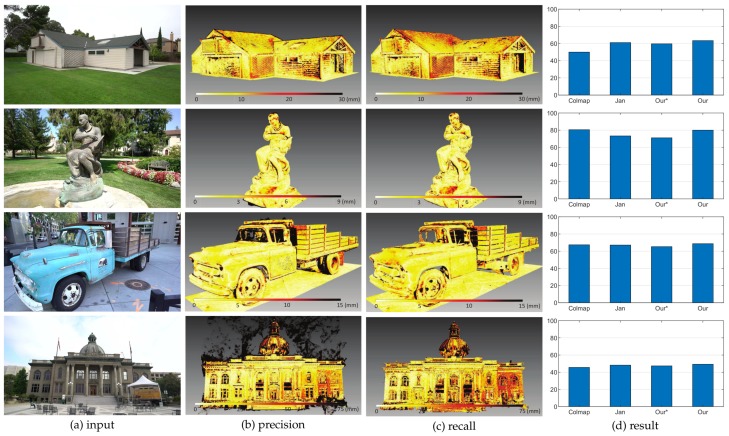
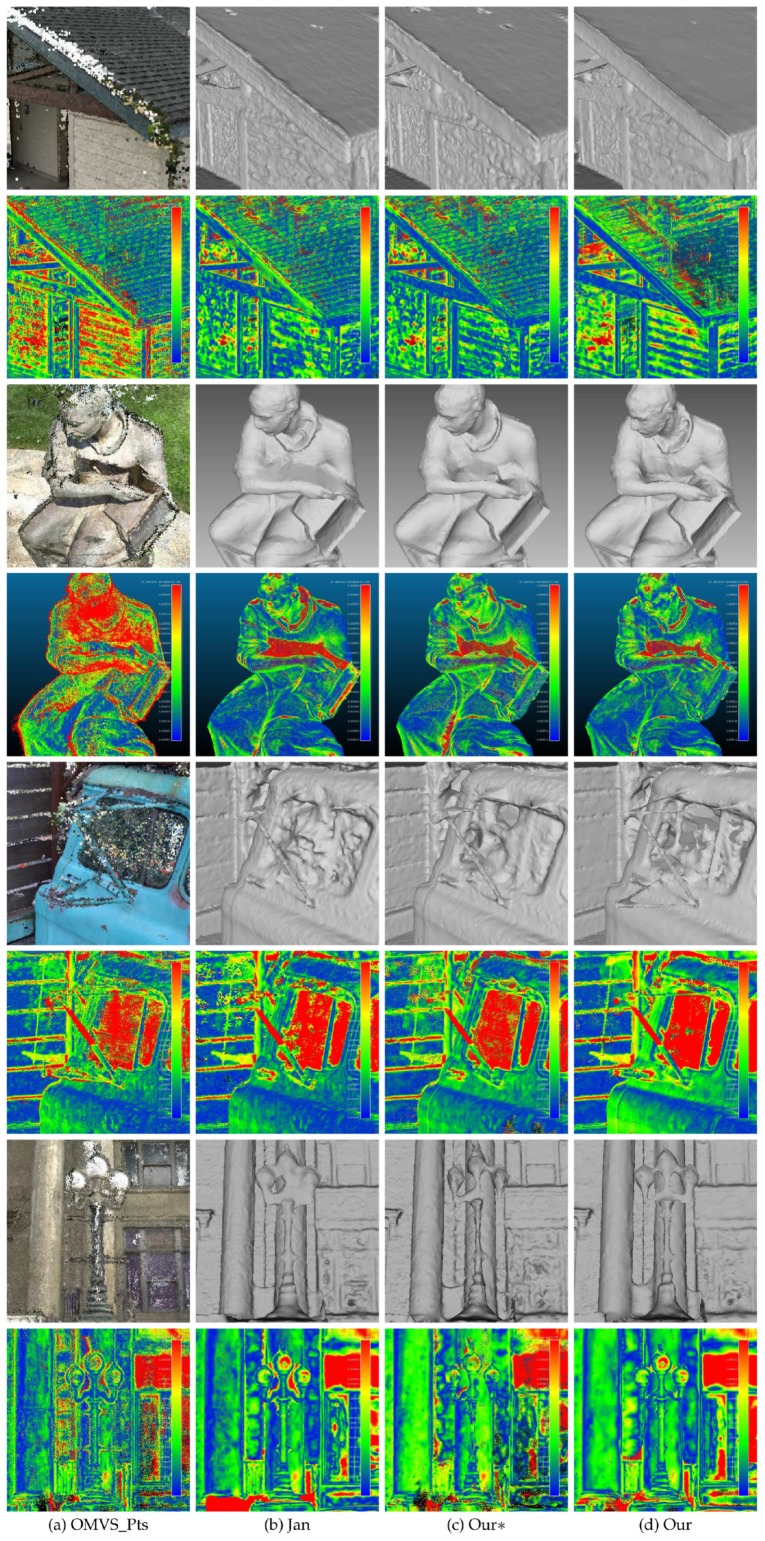
In this paper, we put forward a new method for surface reconstruction from image-based point clouds. In particular, we introduce a new visibility model for each line of sight to preserve scene details without decreasing the noise filtering ability. To make the proposed method suitable for point clouds with heavy noise, we introduce a new likelihood energy term to the total energy of the binary labeling problem of Delaunay tetrahedra, and we give its - graph implementation. Besides, we further improve the performance of the proposed method with the dense visibility technique, which helps to keep the object edge sharp. The experimental result shows that the proposed method rivalled the state-of-the-art methods in terms of accuracy and completeness, and performed better with reference to detail preservation.
在本文中,我们提出了一种从基于图像的点云中进行曲面重建的新方法。具体来说,我们为每条视线引入了新的可见性模型,以在不降低噪声滤波能力的情况下保留场景细节。为了使所提出的方法适用于具有大量噪声的点云,我们在 Delaunay 四面体的二值标记问题的总能量中引入了新的似然能项,并给出了其 - 图实现。此外,我们还使用密集可见性技术进一步提高了所提出方法的性能,这有助于保持物体边缘的锐利度。实验结果表明,所提出的方法在准确性和完整性方面与最先进的方法相媲美,并且在细节保留方面表现更好。