Fan Jia, Huang Yuchun, Shan Jie, Zhang Shun, Zhu Fei
School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China.
Lyles School of Civil Engineering, Purdue University, West Lafayette, IN 47907, USA.
Sensors (Basel). 2019 Apr 30;19(9):2030. doi: 10.3390/s19092030.
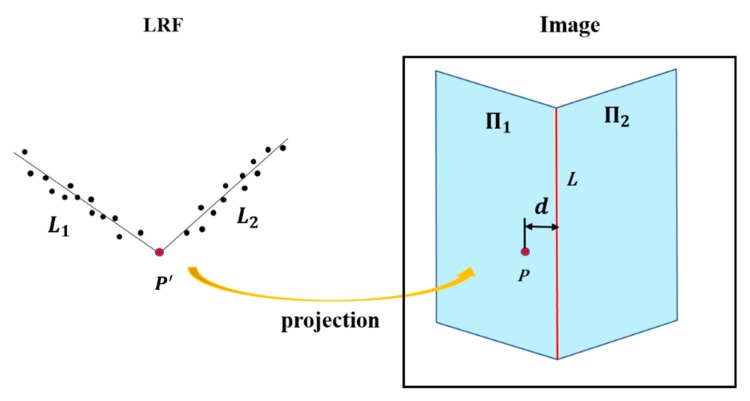
The combination of a camera and a 2D laser rangefinder (LRF) is widely used in robotics, mapping, and unmanned driving to simultaneously obtain the 3D geometry and color texture of a scene. However, data misregistration between the camera and the LRF frequently occurs due to the difficulty of precise installation and alignment between them. Extrinsic calibration between the camera and the LRF is necessary. In this study, a photogrammetric control field is used to perform a robust and accurate calibration between the camera and the LRF which requires only one shot. With the use of the photogrammetric control field as the common reference, extrinsic calibration between two sensors is decoupled by calibrating each sensor separately. First, using the room corner of the control field, the LRF is calibrated with respect to the control field by solving a simplified perspective-three-point problem. Then, a large number of control points are used to obtain the robust and accurate extrinsic parameters of the camera with respect to the control field. Experiments with simulated and real data were performed. The experimental results show that the proposed scheme is accurate, precise, and robust under different noise levels, and the calibration results can be utilized in indoor and outdoor applications.
相机与二维激光测距仪(LRF)的组合在机器人技术、地图绘制和无人驾驶中被广泛应用,用于同时获取场景的三维几何形状和颜色纹理。然而,由于相机和LRF之间精确安装和对齐存在困难,数据配准错误经常发生。相机和LRF之间的外部校准是必要的。在本研究中,使用摄影测量控制场来对相机和LRF进行稳健且精确的校准,这只需要一次拍摄。通过将摄影测量控制场用作公共参考,通过分别校准每个传感器来解耦两个传感器之间的外部校准。首先,利用控制场的房间角落,通过解决简化的透视三点问题来校准LRF相对于控制场的参数。然后,使用大量控制点来获得相机相对于控制场的稳健且精确的外部参数。进行了模拟数据和真实数据的实验。实验结果表明,所提出的方案在不同噪声水平下是准确、精确且稳健的,校准结果可用于室内和室外应用。