Antoniak Gabriel, Biswas Tirthabir, Cortes Nelson, Sikdar Siddhartha, Chun Chanwoo, Bhandawat Vikas
Department of Biology, Duke University, Durham, NC 27708, USA.
Department of Physics, Loyola University, New Orleans, LA 70118, USA.
Biol Open. 2019 Jun 14;8(6):bio043695. doi: 10.1242/bio.043695.
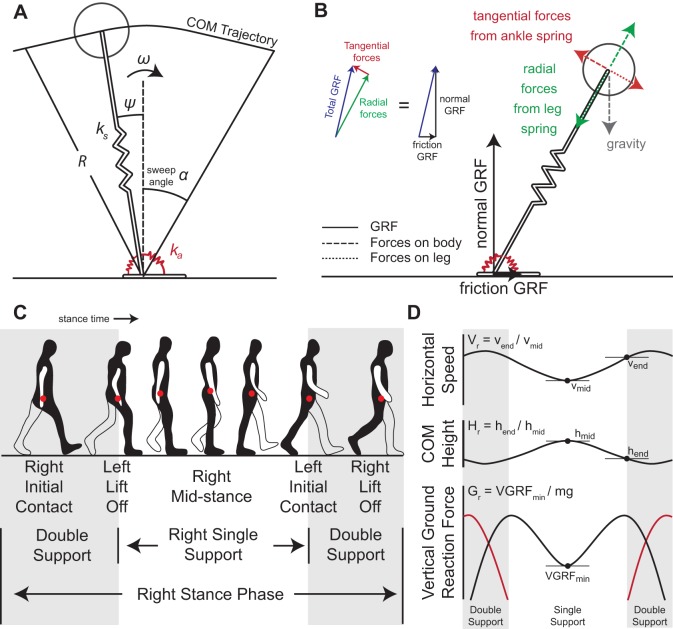
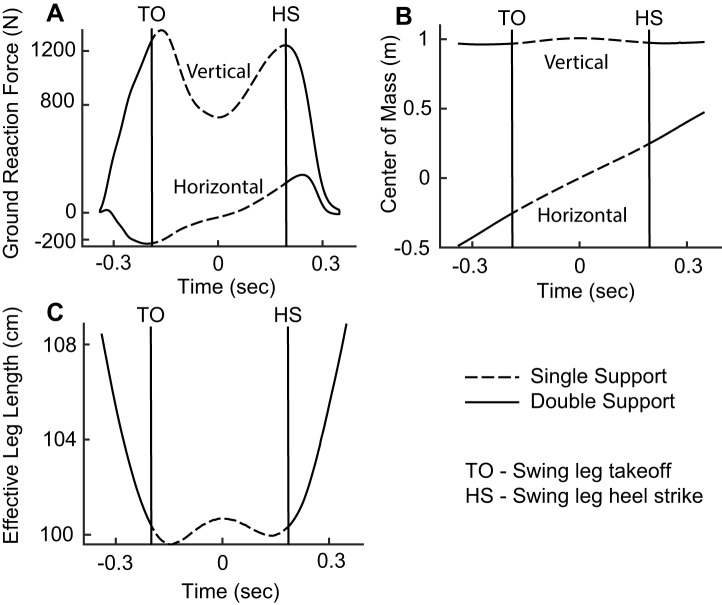
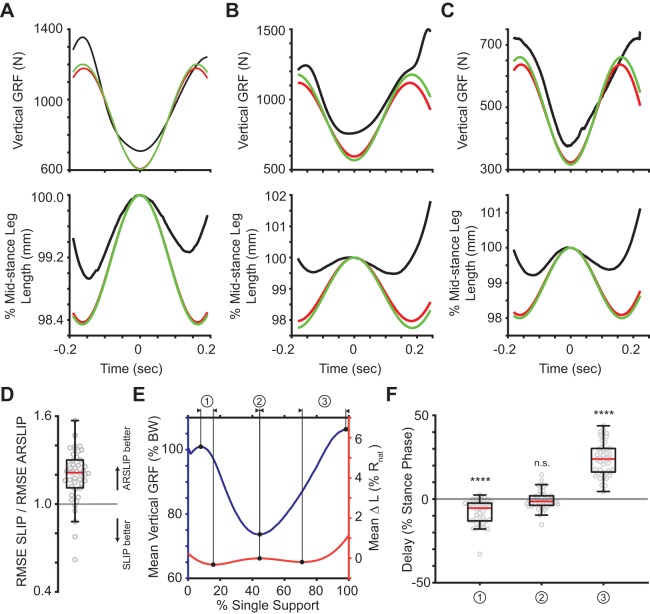
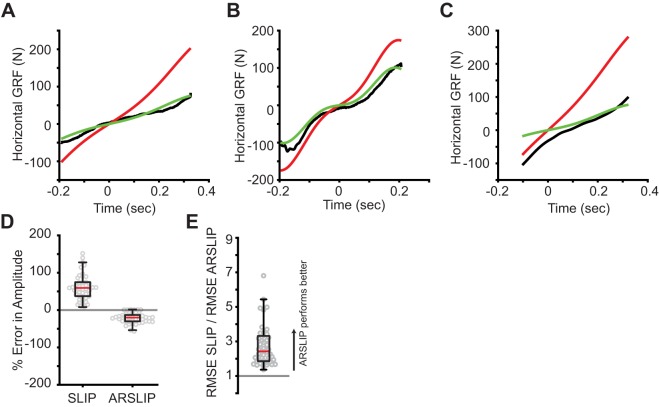
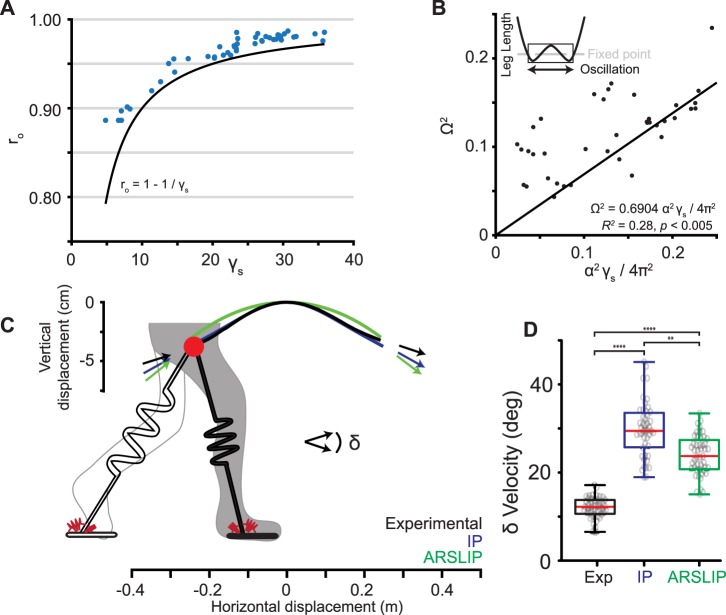
Despite the overall complexity of legged locomotion, the motion of the center of mass (COM) itself is relatively simple, and can be qualitatively described by simple mechanical models. In particular, walking can be qualitatively modeled by a simple model in which each leg is described by a spring-loaded inverted pendulum (SLIP). However, SLIP has many limitations and is unlikely to serve as a quantitative model. As a first step to obtaining a quantitative model for walking, we explored the ability of SLIP to model the single-support phase of walking, and found that SLIP has two limitations. First, it predicts larger horizontal ground reaction forces (GRFs) than empirically observed. A new model - angular and radial spring-loaded inverted pendulum (ARSLIP) - can overcome this deficit. Second, although the leg spring (surprisingly) goes through contraction-extension-contraction-extensions (CECEs) during the single-support phase of walking and can produce the characteristic M-shaped vertical GRFs, modeling the single-support phase requires active elements. Despite these limitations, SLIP as a model provides important insights. It shows that the CECE cycling lengthens the stance duration allowing the COM to travel passively for longer, and decreases the velocity redirection between the beginning and end of a step.
尽管腿部运动整体复杂,但质心(COM)本身的运动相对简单,并且可以通过简单的力学模型进行定性描述。特别是,行走可以通过一个简单模型进行定性建模,其中每条腿由一个弹簧加载倒立摆(SLIP)来描述。然而,SLIP有许多局限性,不太可能作为一个定量模型。作为获得行走定量模型的第一步,我们探究了SLIP对行走单支撑阶段进行建模的能力,发现SLIP有两个局限性。首先,它预测的水平地面反作用力(GRF)比实际观测到的要大。一种新模型——角向和径向弹簧加载倒立摆(ARSLIP)——可以克服这一缺陷。其次,尽管腿部弹簧在行走单支撑阶段会经历收缩 - 伸展 - 收缩 - 伸展(CECE)过程,并且能够产生特征性的M形垂直GRF,但对单支撑阶段进行建模需要有源元件。尽管有这些局限性,SLIP作为一个模型提供了重要的见解。它表明CECE循环延长了站立持续时间,使质心能够被动地移动更长距离,并减少了一步开始和结束之间的速度重定向。