Rodriguez-Cianca David, Weckx Maarten, Jimenez-Fabian Rene, Torricelli Diego, Gonzalez-Vargas Jose, Sanchez-Villamañan M Carmen, Sartori Massimo, Berns Karsten, Vanderborght Bram, Pons J Luis, Lefeber Dirk
Robotics and Multibody Mechanics Research Group, Vrije Universiteit Brussel (VUB) and Flanders Make, Brussels, Belgium.
Cajal Institute, Spanish National Research Council (CSIC), Madrid, Spain.
Front Neurorobot. 2019 May 17;13:20. doi: 10.3389/fnbot.2019.00020. eCollection 2019.
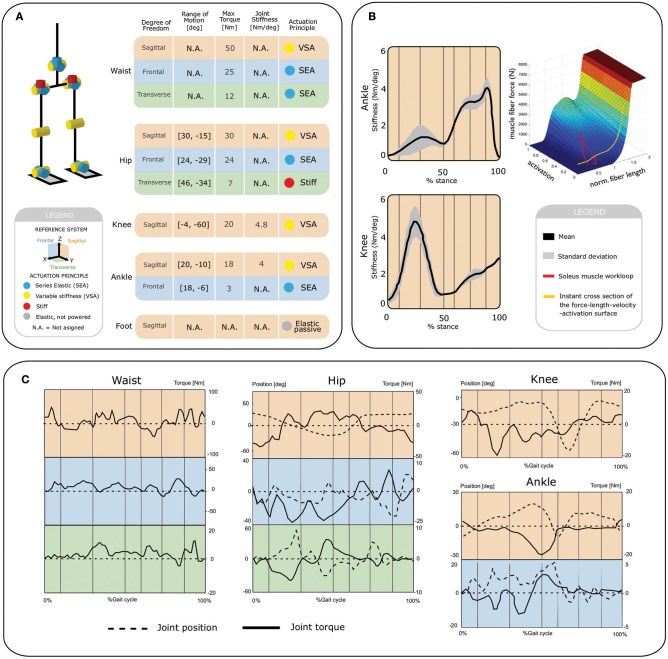
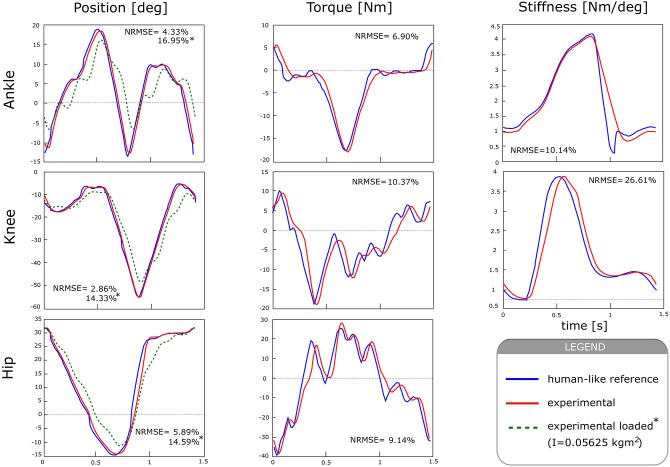
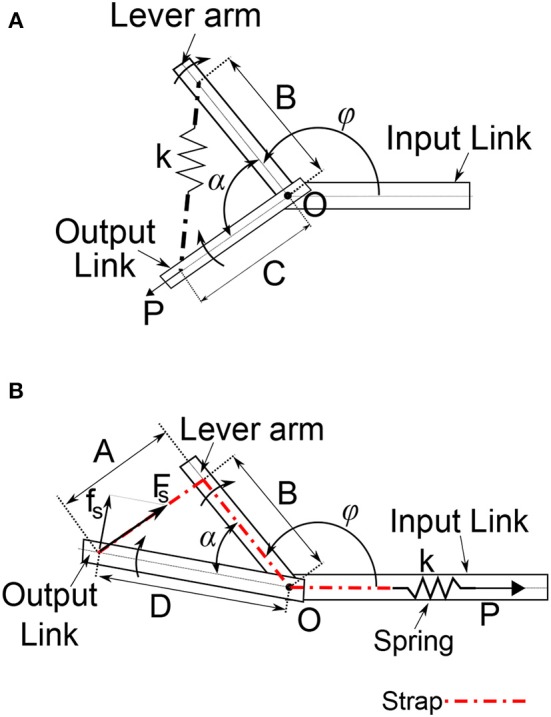
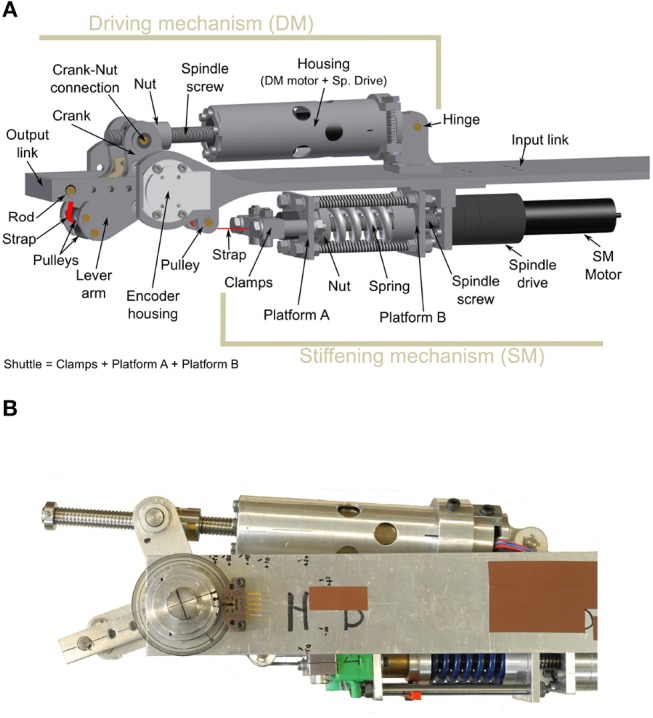
Achieving human-like locomotion with humanoid platforms often requires the use of variable stiffness actuators (VSAs) in multi-degree-of-freedom robotic joints. VSAs possess 2 motors for the control of both stiffness and equilibrium position. Hence, they add mass and mechanical complexity to the design of humanoids. Mass distribution of the legs is an important design parameter, because it can have detrimental effects on the cost of transport. This work presents a novel VSA module, designed to be implemented in a bio-inspired humanoid robot, Binocchio, that houses all components on the same side of the actuated joint. This feature allowed to place the actuator's mass to more proximal locations with respect to the actuated joint instead of concentrating it at the joint level, creating a more favorable mass distribution in the humanoid. Besides, it also facilitated it's usage in joints with centralized multi-degree of freedom (DoF) joints instead of cascading single DoF modules. The design of the VSA module is presented, including it's integration in the multi-DoFs joints of Binocchio. Experiments validated the static characteristics of the VSA module to accurately estimate the output torque and stiffness. The dynamic responses of the driving and stiffening mechanisms are shown. Finally, experiments show the ability of the actuation system to replicate the envisioned human-like kinematic, torque and stiffness profiles for Binocchio.
利用类人机器人平台实现类人运动通常需要在多自由度机器人关节中使用可变刚度驱动器(VSA)。VSA拥有两个用于控制刚度和平衡位置的电机。因此,它们增加了类人机器人设计的质量和机械复杂性。腿部的质量分布是一个重要的设计参数,因为它可能对运输成本产生不利影响。这项工作提出了一种新型VSA模块,设计用于在受生物启发的类人机器人Binocchio中实现,该模块将所有组件安置在驱动关节的同一侧。这一特性使得可以将驱动器的质量放置在相对于驱动关节更靠近近端的位置,而不是将其集中在关节处,从而在类人机器人中创造出更有利的质量分布。此外,它还便于在具有集中式多自由度(DoF)关节的关节中使用,而不是级联单个DoF模块。介绍了VSA模块的设计,包括其在Binocchio多自由度关节中的集成。实验验证了VSA模块的静态特性,以准确估计输出扭矩和刚度。展示了驱动和刚度增强机制的动态响应。最后,实验表明了驱动系统能够为Binocchio复制预想的类人运动学、扭矩和刚度曲线。