Shenzhen Engineering Lab for Medical Intelligent Wireless Ultrasonic Imaging Technology, Harbin Institute of Technolgoy, Shenzhen 518055, China.
Ningbo Institute of Technology, Zhejiang University, Ningbo 315000, China.
Sensors (Basel). 2019 Jun 19;19(12):2746. doi: 10.3390/s19122746.
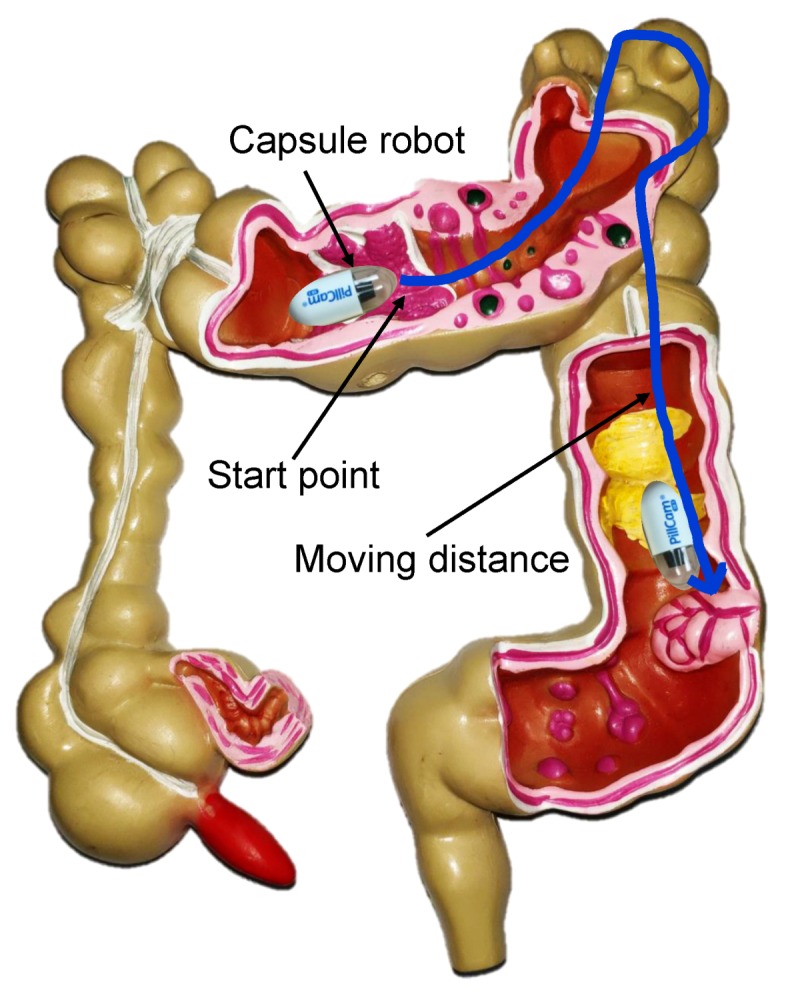
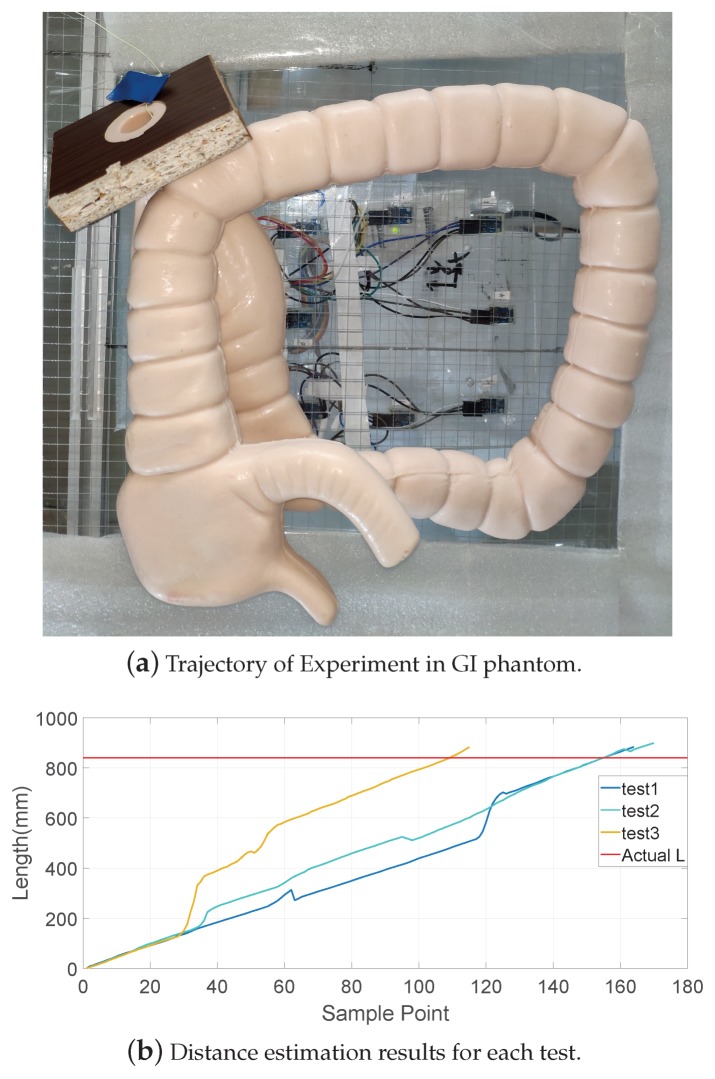
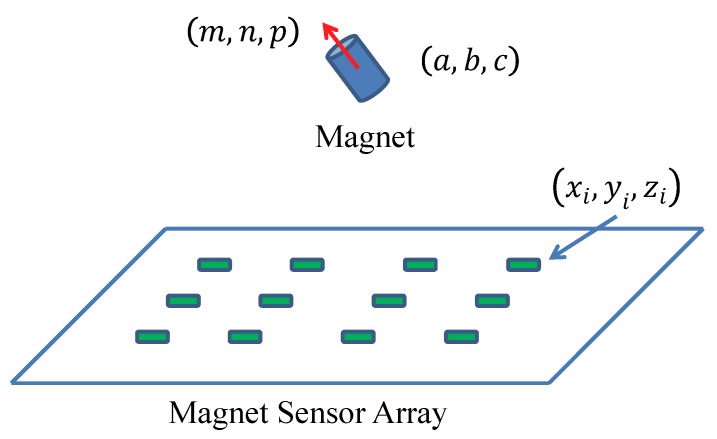
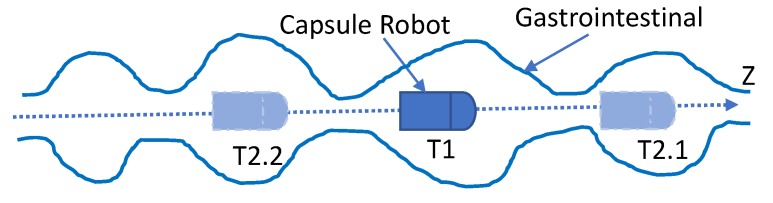
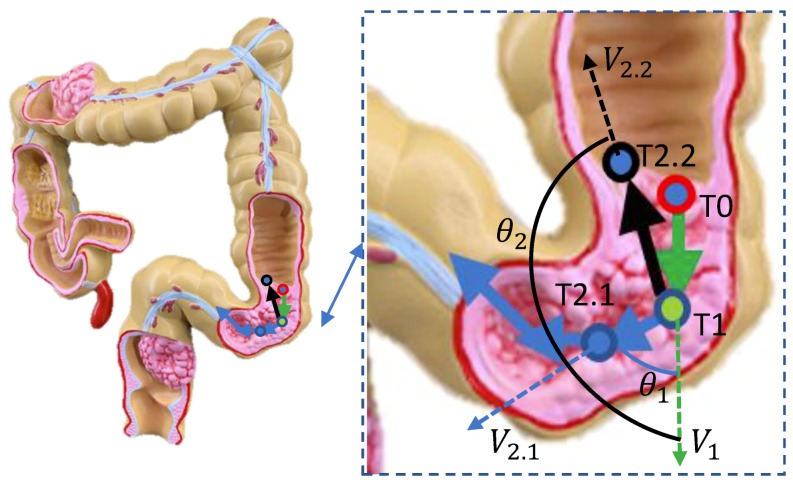
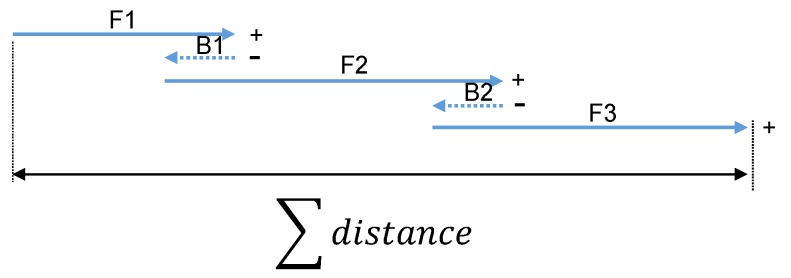
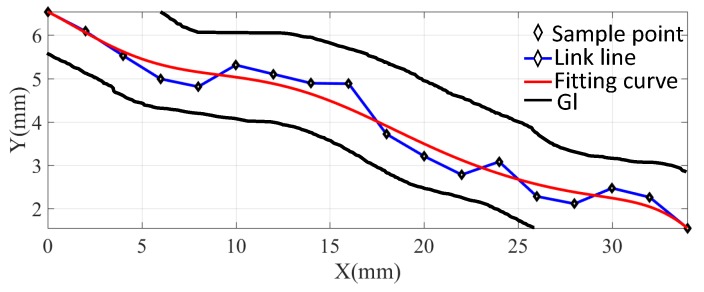
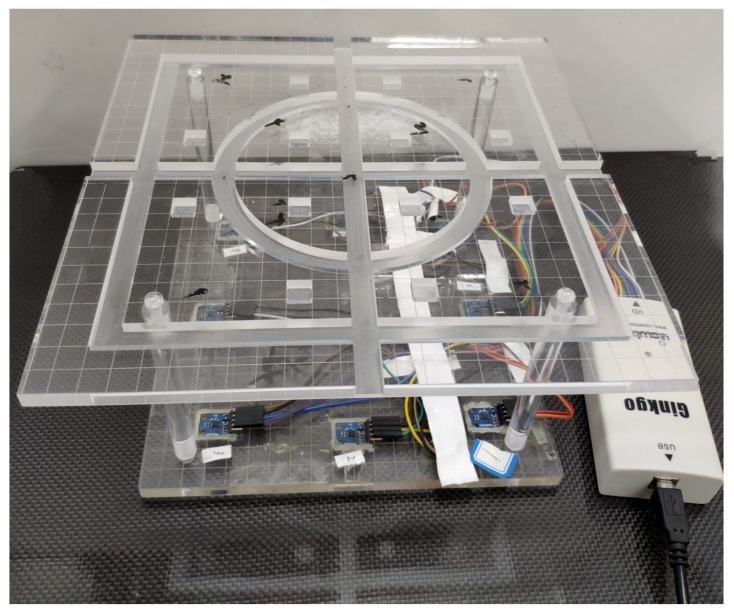
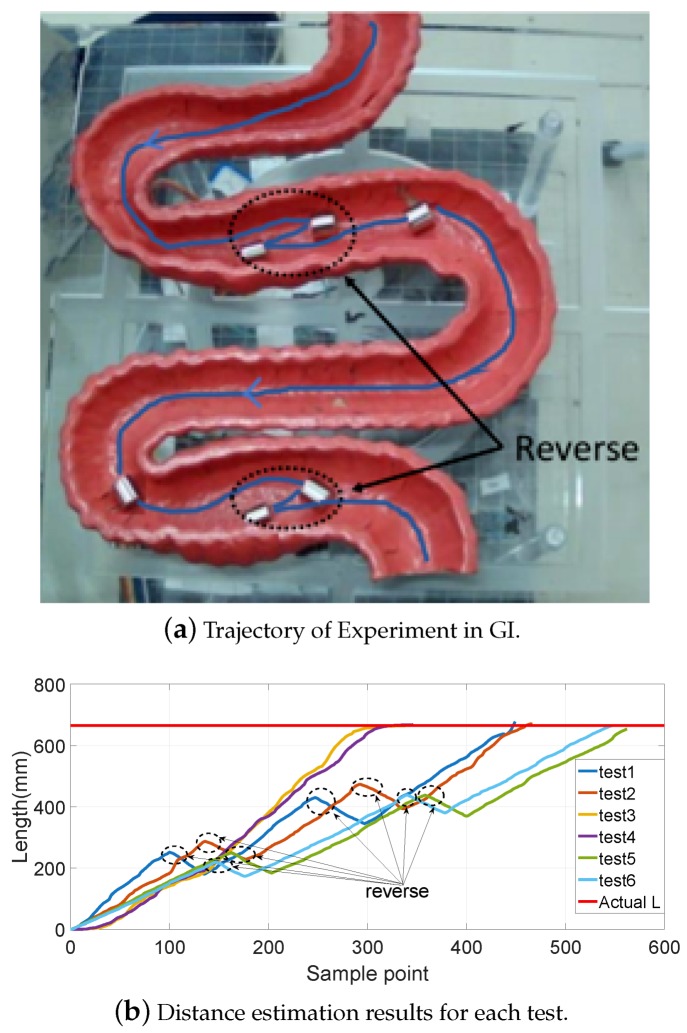
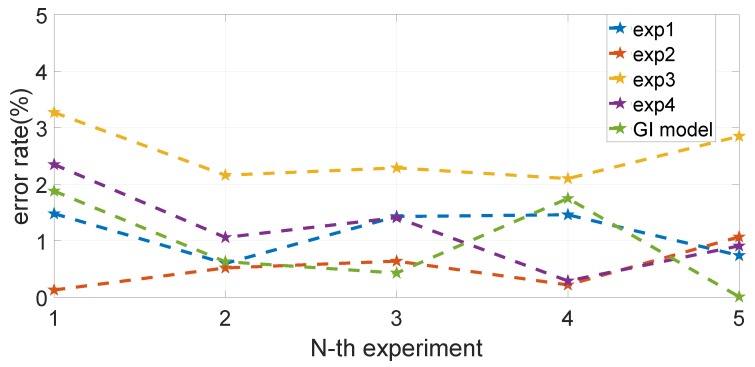
Recently, a variety of positioning and tracking methods have been proposed for capsule robots moving in the gastrointestinal (GI) tract to provide real-time unobstructed spatial pose results. However, the current absolute position-based result cannot match the GI structure due to its unstructured environment. To overcome this disadvantage and provide a proper position description method to match the GI tract, we here present a relative position estimation method for tracking the capsule robot, which uses the moving distance of the robot along the GI tract to indicate the position result. The procedure of the proposed method is as follows: firstly, the absolute position results of the capsule robot are obtained with the magnetic tracking method; then, the moving status of the robot along the GI tract is determined according to the moving direction; and finally, the movement trajectory of the capsule robot is fitted with the Bézier curve, where the moving distance can then be evaluated using the integral method. Compared to state-of-the-art capsule tracking methods, the proposed method can directly help to guide medical instruments by providing physicians the insertion distance in patients' bodies, which cannot be done based on absolute position results. Moreover, as relative distance information was used, no reference tracking objects needed to be mounted onto the human body. The experimental results prove that the proposed method achieves a good distance estimation of the capsule robot moving in the simulation platform.
最近,已经提出了多种用于在胃肠道 (GI) 中移动的胶囊机器人的定位和跟踪方法,以提供实时的无阻碍空间姿势结果。然而,由于其非结构化的环境,当前基于绝对位置的结果无法与 GI 结构匹配。为了克服这一缺点并提供与 GI 道相匹配的适当位置描述方法,我们在这里提出了一种用于跟踪胶囊机器人的相对位置估计方法,该方法使用机器人在 GI 道中的移动距离来指示位置结果。所提出方法的过程如下:首先,使用磁性跟踪方法获得胶囊机器人的绝对位置结果;然后,根据移动方向确定机器人在 GI 道中的移动状态;最后,用贝塞尔曲线拟合胶囊机器人的运动轨迹,然后使用积分方法评估移动距离。与最先进的胶囊跟踪方法相比,该方法可以通过提供医生在患者体内的插入距离直接帮助指导医疗器械,而基于绝对位置结果则无法做到这一点。此外,由于使用了相对距离信息,因此不需要将参考跟踪对象安装到人体上。实验结果证明,所提出的方法在模拟平台中实现了对胶囊机器人移动的良好距离估计。