Wu Zhongyuan, Sang Jun, Zhang Qian, Xiang Hong, Cai Bin, Xia Xiaofeng
Key Laboratory of Dependable Service Computing in Cyber Physical Society of Ministry of Education, Chongqing University, Chongqing 40004, China.
School of Big Data & Software Engineering, Chongqing University, Chongqing 401331, China.
Sensors (Basel). 2019 Jul 30;19(15):3336. doi: 10.3390/s19153336.
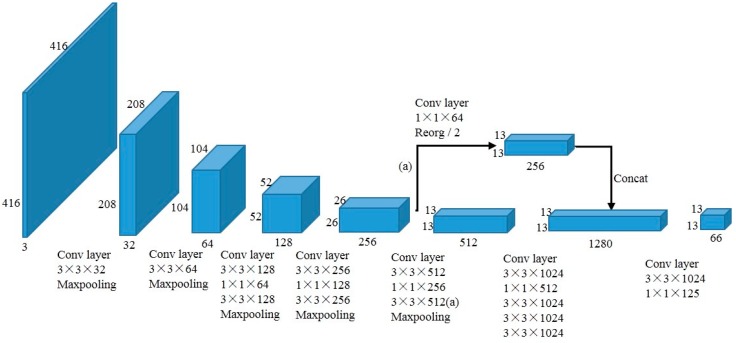
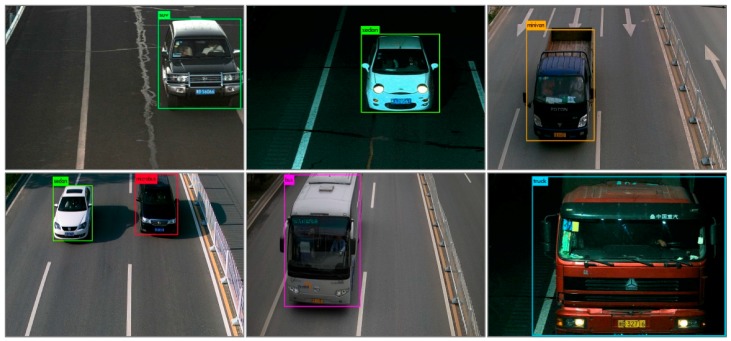
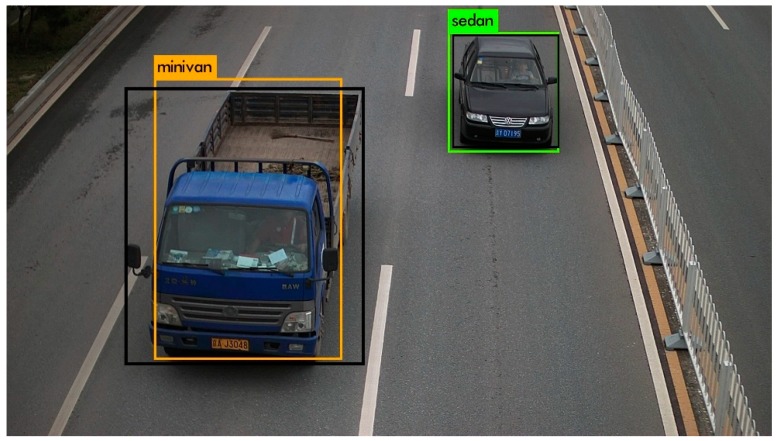
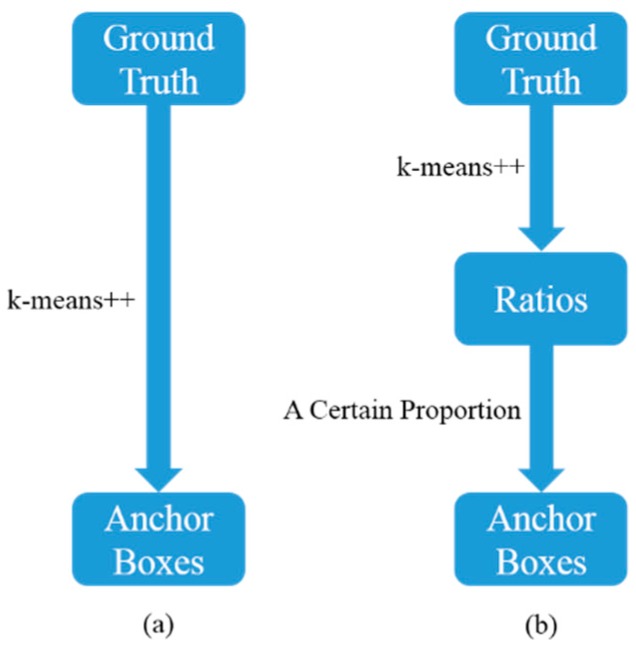
Vehicle detection is a challenging task in computer vision. In recent years, numerous vehicle detection methods have been proposed. Since the vehicles may have varying sizes in a scene, while the vehicles and the background in a scene may be with imbalanced sizes, the performance of vehicle detection is influenced. To obtain better performance on vehicle detection, a multi-scale vehicle detection method was proposed in this paper by improving YOLOv2. The main contributions of this paper include: (1) a new anchor box generation method Rk-means++ was proposed to enhance the adaptation of varying sizes of vehicles and achieve multi-scale detection; (2) Focal Loss was introduced into YOLOv2 for vehicle detection to reduce the negative influence on training resulting from imbalance between vehicles and background. The experimental results upon the Beijing Institute of Technology (BIT)-Vehicle public dataset demonstrated that the proposed method can obtain better performance on vehicle localization and recognition than that of other existing methods.
车辆检测是计算机视觉中的一项具有挑战性的任务。近年来,人们提出了众多车辆检测方法。由于场景中的车辆可能具有不同的尺寸,并且场景中车辆与背景的尺寸可能不均衡,这影响了车辆检测的性能。为了在车辆检测中获得更好的性能,本文通过改进YOLOv2提出了一种多尺度车辆检测方法。本文的主要贡献包括:(1)提出了一种新的锚框生成方法Rk-means++,以增强对不同尺寸车辆的适应性并实现多尺度检测;(2)将焦点损失(Focal Loss)引入YOLOv2用于车辆检测,以减少车辆与背景之间的不平衡对训练产生的负面影响。在北京理工大学(BIT)车辆公开数据集上的实验结果表明,所提出的方法在车辆定位和识别方面比其他现有方法具有更好的性能。