Khamar Maryam, Edrisi Mehdi, Zahiri Mohsen
Electrical Dept., Faculty of Engineering, University of Isfahan, Isfahan, Iran.
MethodsX. 2019 Aug 23;6:1838-1846. doi: 10.1016/j.mex.2019.08.014. eCollection 2019.
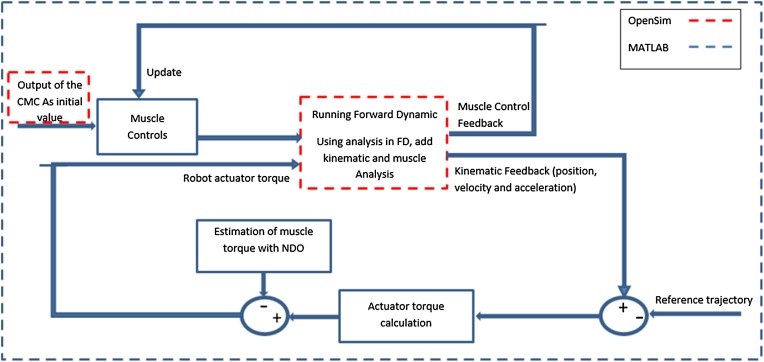
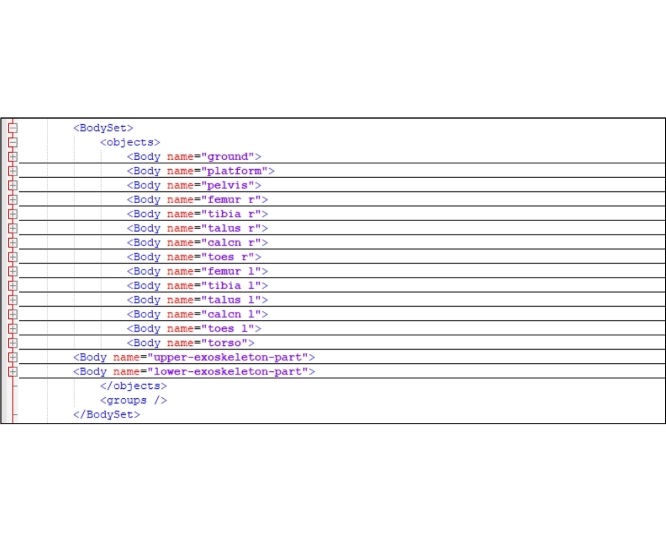
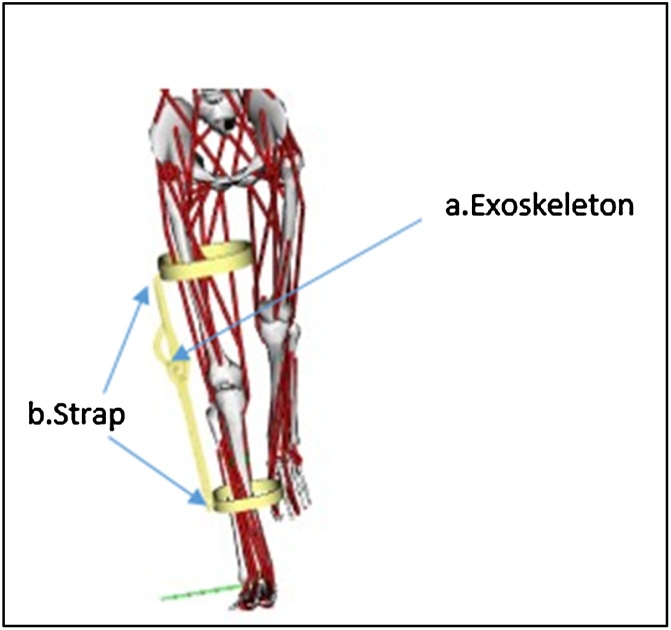
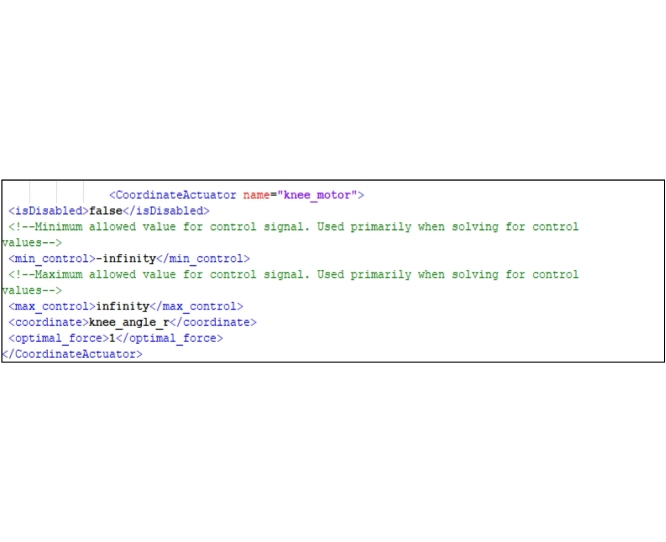
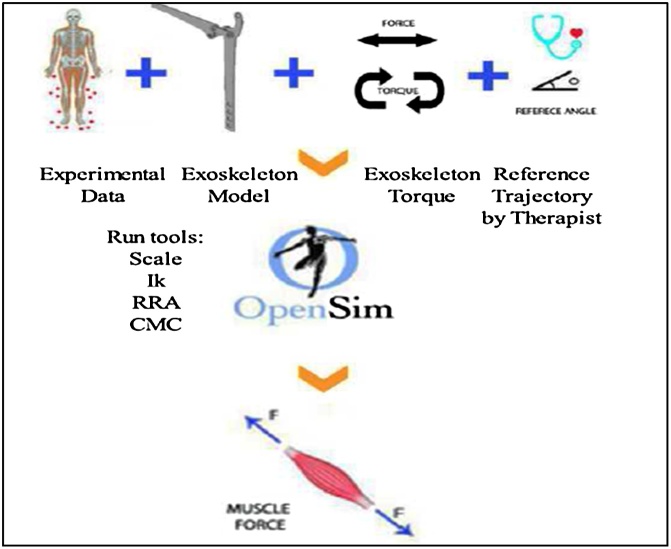
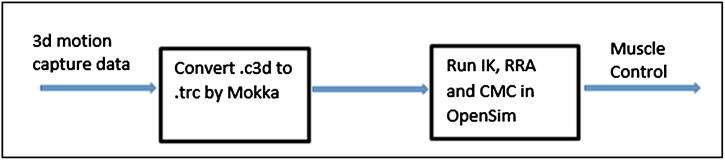
Exoskeletons are new robotic systems that are in close contact with the human body. Thus, their performances are influenced by many factors, including the selection of its structure, actuators, measurement devices, parameters, and mechanism of coupling to the human body. The latter offers numerous challenges to its design, evaluation and modification, including analyzing the effectiveness of the exoskeleton, finding the optimal force for actuators and, discovering the effect of changes in design parameters on human muscle behavior, which are very difficult to measure. Therefore, numerical simulations play an important role in solving these challenges and have the potential to improve treatment strategies and medical decision-making. In this study, a simulation-based method is presented for the designing and analysis of the parameters of an exoskeleton and its wearer's kinetics and kinematics. Model-based design software, including OpenSim and Inventor, and mathematical software, such as MATLAB, are integrated. This method can assist in the modification of exoskeleton devices and allow physiologists, neuroscientists, and physical therapists to generate new solutions for rehabilitation programs using exoskeletons. •Using the movements parameters of each individual subject in her/his exoskeleton design.•Combining the power of OpenSim body movement and the ability of Matlab in mathematical calculations.•Considering the effect of exoskeleton parameters on each muscle-skeleton movement.
外骨骼是与人体密切接触的新型机器人系统。因此,它们的性能受到许多因素的影响,包括其结构、致动器、测量装置、参数以及与人体的耦合机制的选择。后者对其设计、评估和修改提出了诸多挑战,包括分析外骨骼的有效性、找到致动器的最佳力以及发现设计参数变化对人体肌肉行为的影响,而这些都很难测量。因此,数值模拟在解决这些挑战方面发挥着重要作用,并且有可能改善治疗策略和医疗决策。在本研究中,提出了一种基于模拟的方法,用于设计和分析外骨骼及其穿戴者的动力学和运动学参数。集成了基于模型的设计软件,包括OpenSim和Inventor,以及数学软件,如MATLAB。这种方法可以协助对外骨骼设备进行修改,并使生理学家、神经科学家和物理治疗师能够为使用外骨骼的康复计划生成新的解决方案。
•在其外骨骼设计中使用每个个体受试者的运动参数。
•结合OpenSim身体运动的能力和Matlab在数学计算方面的能力。
•考虑外骨骼参数对每个肌肉骨骼运动的影响。