Department of Mechanical, Aerospace and Civil Engineering, The University of Manchester, Manchester, UK.
Institute of Mechanical Engineering, University of Salford, Manchester, UK.
Ann Biomed Eng. 2020 Apr;48(4):1181-1195. doi: 10.1007/s10439-019-02439-2. Epub 2019 Dec 16.
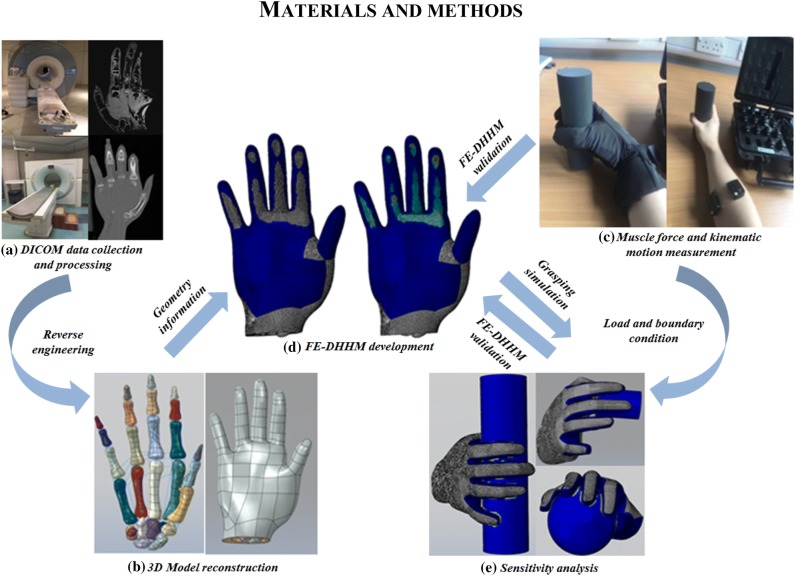
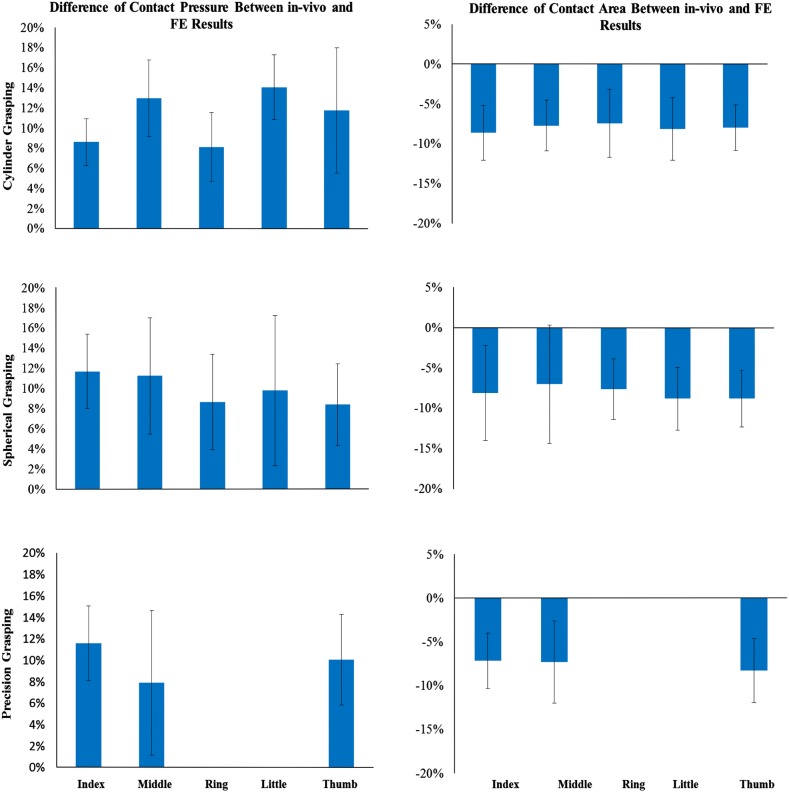
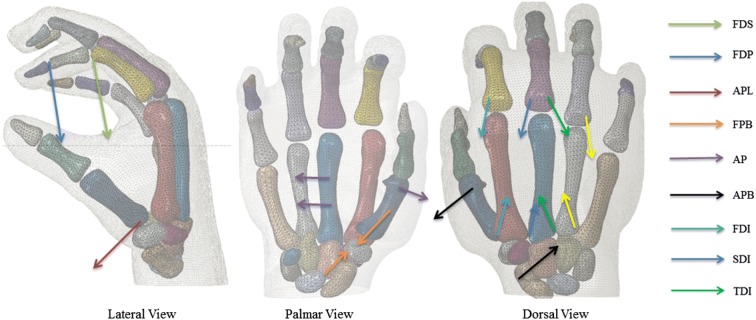
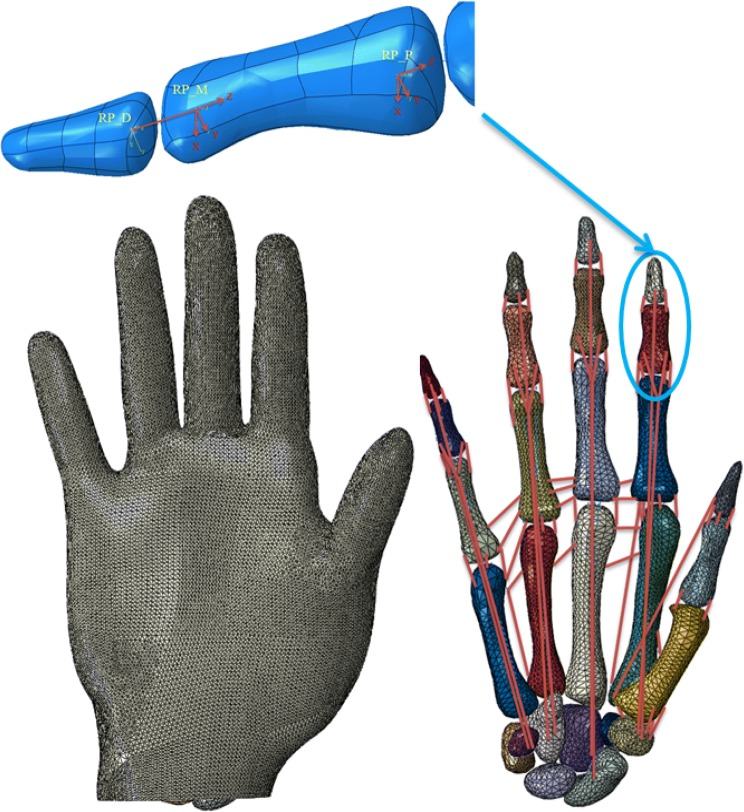
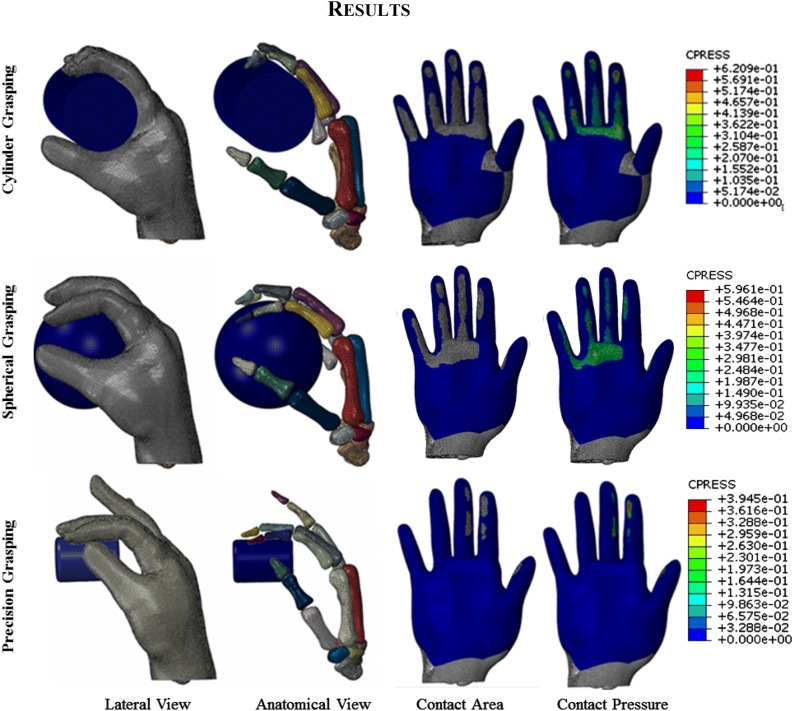
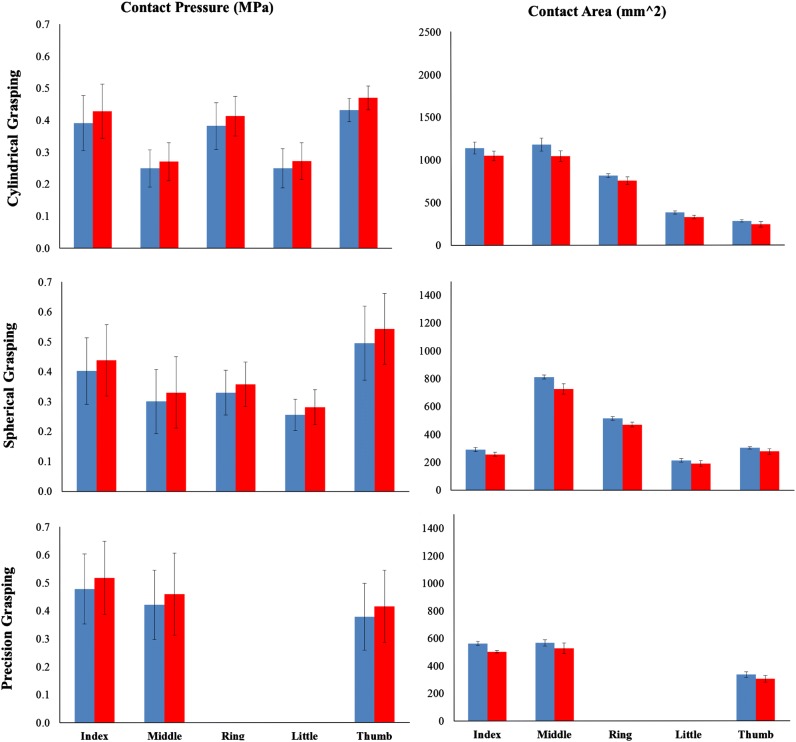
This paper aims to develop and validate a subject-specific framework for modelling the human hand. This was achieved by combining medical image-based finite element modelling, individualized muscle force and kinematic measurements. Firstly, a subject-specific human hand finite element (FE) model was developed. The geometries of the phalanges, carpal bones, wrist bones, ligaments, tendons, subcutaneous tissue and skin were all included. The material properties were derived from in-vivo and in-vitro experiment results available in the literature. The boundary and loading conditions were defined based on the kinematic data and muscle forces of a specific subject captured from the in-vivo grasping tests. The predicted contact pressure and contact area were in good agreement with the in-vivo test results of the same subject, with the relative errors for the contact pressures all being below 20%. Finally, sensitivity analysis was performed to investigate the effects of important modelling parameters on the predictions. The results showed that contact pressure and area were sensitive to the material properties and muscle forces. This FE human hand model can be used to make a detailed and quantitative evaluation into biomechanical and neurophysiological aspects of human hand contact during daily perception and manipulation. The findings can be applied to the design of the bionic hands or neuro-prosthetics in the future.
本文旨在开发和验证一种用于模拟人手的特定于个体的框架。这是通过结合基于医学图像的有限元建模、个性化肌肉力量和运动学测量来实现的。首先,开发了一种特定于个体的人手有限元(FE)模型。该模型包括指骨、腕骨、掌骨、韧带、肌腱、皮下组织和皮肤的几何形状。材料特性是根据文献中可获得的体内和体外实验结果推导出来的。边界和加载条件是根据特定个体的运动学数据和从体内抓取测试中捕获的肌肉力来定义的。预测的接触压力和接触面积与同一受试者的体内测试结果非常吻合,接触压力的相对误差均低于 20%。最后,进行了敏感性分析,以研究重要建模参数对预测的影响。结果表明,接触压力和面积对材料特性和肌肉力很敏感。该 FE 人手模型可用于对日常感知和操作过程中人类手部接触的生物力学和神经生理学方面进行详细和定量的评估。研究结果可应用于未来仿生手或神经义肢的设计。