Research Department, NATO STO Center for Maritime Research and Experimentation (CMRE), La Spezia, Italy.
Sensors (Basel). 2020 Jan 29;20(3):737. doi: 10.3390/s20030737.
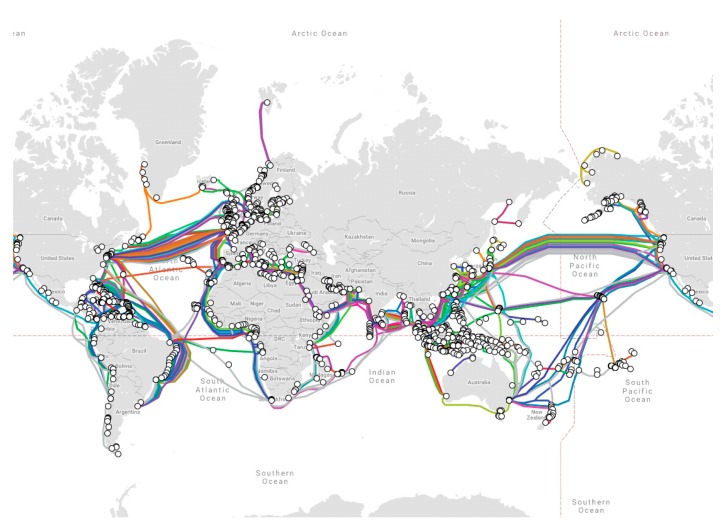
Underwater communication cables transport large amounts of sensitive information between countries. This fact converts these cables into a critical infrastructure that must be protected. Monitoring the underwater cable environment is rare and any intervention is usually driven by cable faults. In the last few years, several reports raised issues about possible future malicious attacks on such cables. The main objective of this operational research and analysis (ORA) paper is to present an overview of different commercial and already available marine sensor technologies (acoustic, optic, magnetic and oceanographic) that could be used for autonomous monitoring of the underwater cable environment. These sensors could be mounted on different autonomous platforms, such as unmanned surface vehicles (USVs) or autonomous underwater vehicles (AUVs). This paper analyses a multi-threat sabotage scenario where surveying a transatlantic cable of 13,000 km, (reaching water depths up to 4000 m) is necessary. The potential underwater threats identified for such a scenario are: divers, anchors, fishing trawls, submarines, remotely operated vehicles (ROVs) and AUVs. The paper discusses the capabilities of the identified sensors to detect such identified threats for the scenario under study. It also presents ideas on the construction of periodic and permanent surveillance networks. Research study and results are focused on providing useful information to decision-makers in charge of designing surveillance capabilities to secure underwater communication cables.
水下通信电缆在国家之间传输大量敏感信息。这一事实使这些电缆成为必须加以保护的关键基础设施。对水下电缆环境的监测很少见,任何干预通常都是由电缆故障驱动的。在过去几年中,有几份报告提出了关于未来可能对这些电缆进行恶意攻击的问题。本运营研究和分析(ORA)论文的主要目的是概述可用于水下电缆环境自主监测的各种商业和现有的海洋传感器技术(声学、光学、磁性和海洋学)。这些传感器可以安装在不同的自主平台上,如无人水面舰艇(USV)或自主水下航行器(AUV)。本文分析了一个多威胁破坏场景,其中需要对一条 13000 公里长的跨大西洋电缆(水深可达 4000 米)进行勘测。为这种情况确定的潜在水下威胁有:潜水员、锚、拖网渔船、潜艇、遥控潜水器(ROV)和 AUV。本文讨论了所确定的传感器检测研究情景下这些确定的威胁的能力。它还提出了关于构建定期和永久监测网络的想法。研究重点是为负责设计水下通信电缆安全监测能力的决策者提供有用信息。