Sun Haili, Liu Shuang, Zhong Ruofei, Du Liming
Beijing Advanced Innovation Center for Imaging Theory and Technology, Key Laboratory of 3D Information Acquisition and Application, MOE, Capital Normal University, Beijing 100048, China.
College of Resource Environment and Tourism, Capital Normal University, Beijing 100048, China.
Sensors (Basel). 2020 Feb 13;20(4):1006. doi: 10.3390/s20041006.
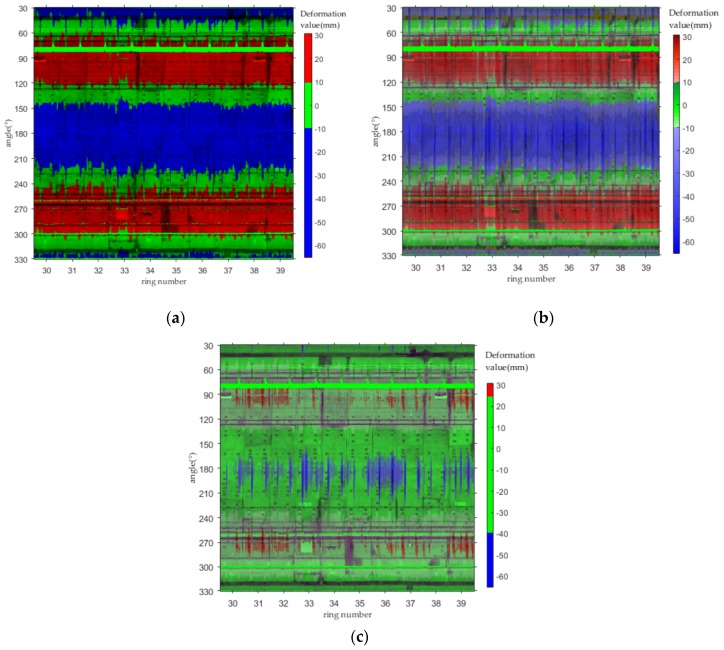
With the ongoing developments in laser scanning technology, applications for describing tunnel deformation using rich point cloud data have become a significant topic of investigation. This study describes the independently developed CNU-TS-2 mobile tunnel monitoring system for data acquisition, which has an electric system to control its forward speed and is compatible with various laser scanners such as the Faro and Leica models. A comparison with corresponding data acquired by total station data demonstrates that the data collected by CNU-TS-2 is accurate. Following data acquisition, the overall and local deformation of the tunnel is determined by denoising and 360° deformation analysis of the point cloud data. To enhance the expression of the analysis results, this study proposes an expansion of the tunnel point cloud data into a two-dimensional image via cylindrical projection, followed by an expression of the tunnel deformation through color difference to visualize the deformation. Compared with the three-dimensional modeling method of visualization, this method is easier to implement and facilitates storage. In addition, it is conducive to the performance of comprehensive analysis of problems such as water leakage in the tunnel, thereby achieving the effect of multiple uses for a single image.
随着激光扫描技术的不断发展,利用丰富的点云数据描述隧道变形的应用已成为一个重要的研究课题。本研究介绍了自主研发的用于数据采集的CNU - TS - 2移动隧道监测系统,该系统有一个电气系统来控制其前进速度,并与各种激光扫描仪兼容,如法如和徕卡型号。与全站仪采集的相应数据对比表明,CNU - TS - 2采集的数据是准确的。在数据采集之后,通过对点云数据进行去噪和360°变形分析来确定隧道的整体和局部变形。为了增强分析结果的表现力,本研究提出通过圆柱投影将隧道点云数据扩展为二维图像,然后通过色差来表达隧道变形以可视化变形情况。与三维建模可视化方法相比,该方法更易于实现且便于存储。此外,它有利于对隧道漏水等问题进行综合分析,从而实现一图多用的效果。