School of Mechanical Engineering, University of Leeds, Leeds LS2 9JT, UK.
Department of Bioengineering, Imperial College London, London SW7 2AZ, UK.
Sensors (Basel). 2020 Feb 19;20(4):1123. doi: 10.3390/s20041123.
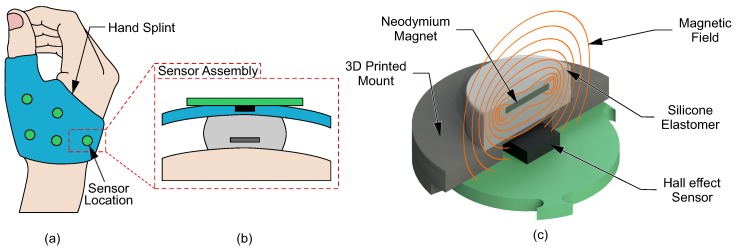
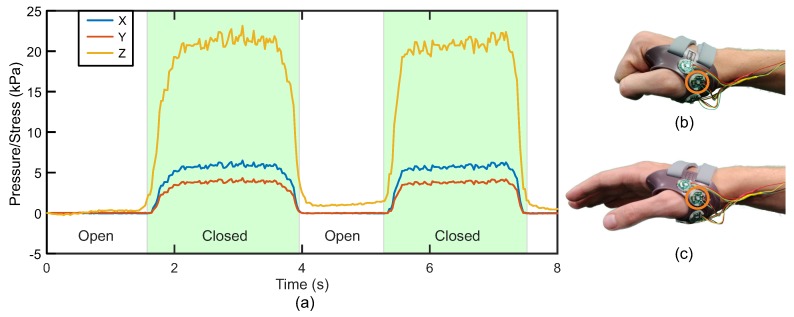
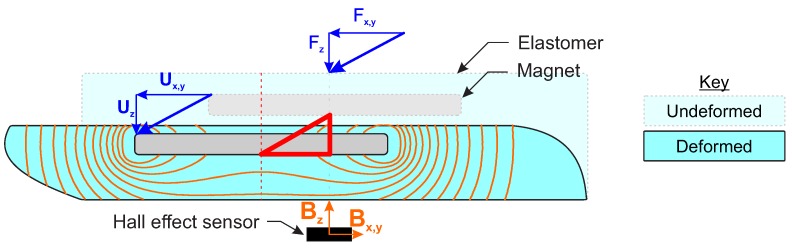
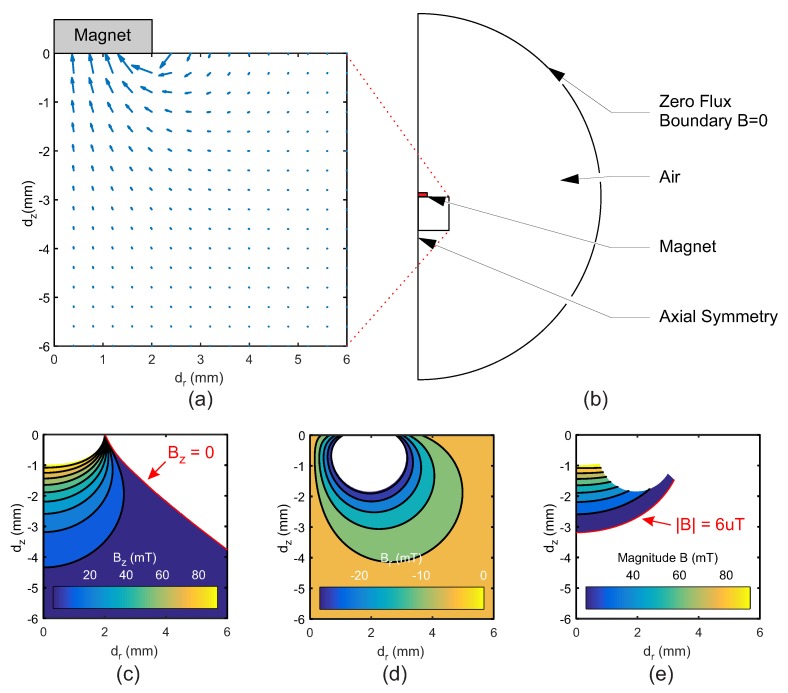
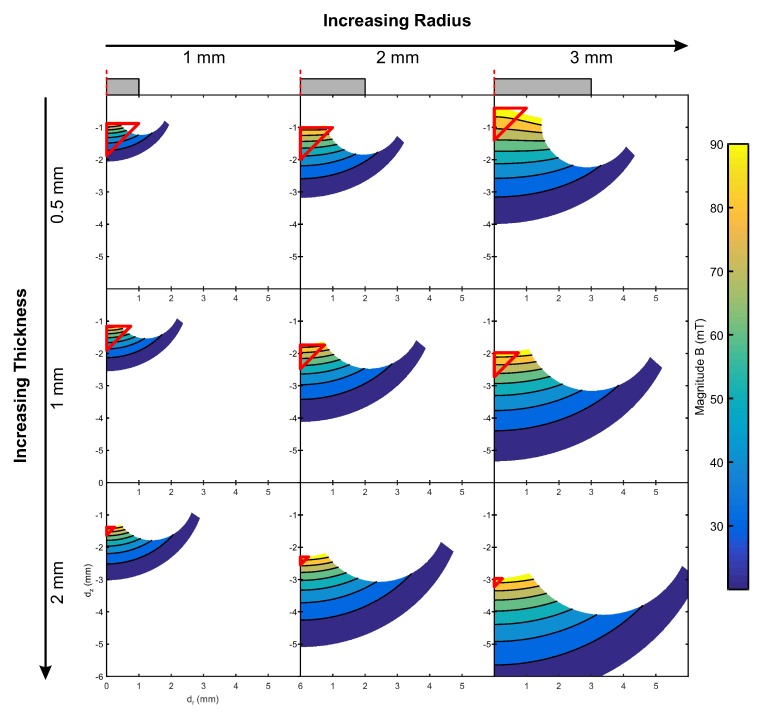
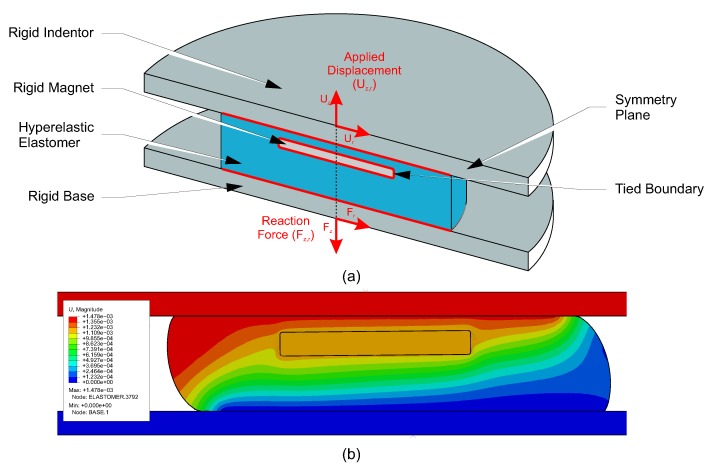
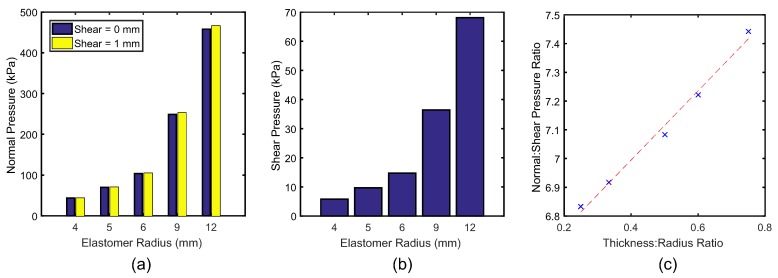
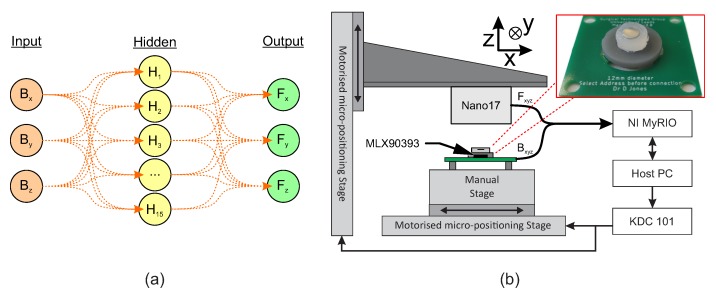
Splinting techniques are widely used in medicine to inhibit the movement of arthritic joints. Studies into the effectiveness of splinting as a method of pain reduction have generally yielded positive results, however, no significant difference has been found in clinical outcomes between splinting types. Tactile sensing has shown great promise for the integration into splinting devices and may offer further information into applied forces to find the most effective methods of splinting. Hall effect-based tactile sensors are of particular interest in this application owing to their low-cost, small size, and high robustness. One complexity of the sensors is the relationship between the elastomer geometry and the measurement range. This paper investigates the design parameters of Hall effect tactile sensors for use in hand splinting. Finite element simulations are used to locate the areas in which sensitivity is high in order to optimise the deflection range of the sensor. Further simulations then investigate the mechanical response and force ranges of the elastomer layer under loading which are validated with experimental data. A 4 mm radius, 3 mm-thick sensor is identified as meeting defined sensing requirements for range and sensitivity. A prototype sensor is produced which exhibits a pressure range of 45 kPa normal and 6 kPa shear. A proof of principle prototype demonstrates how this can be integrated to form an instrumented splint with multi-axis sensing capability and has the potential to inform clinical practice for improved splinting.
夹板技术在医学中被广泛用于抑制关节炎关节的运动。研究夹板作为减轻疼痛方法的有效性的研究通常得出了积极的结果,然而,夹板类型之间的临床结果没有发现显著差异。触觉感应已显示出将其集成到夹板设备中的巨大潜力,并可能提供有关应用力的进一步信息,以找到最有效的夹板方法。基于霍尔效应的触觉传感器在这种应用中特别有趣,因为它们具有低成本、小尺寸和高鲁棒性。传感器的一个复杂性是弹性体几何形状和测量范围之间的关系。本文研究了用于手部夹板的霍尔效应触觉传感器的设计参数。有限元模拟用于定位灵敏度高的区域,以优化传感器的偏置范围。然后进一步的模拟研究了在加载下弹性体层的机械响应和力范围,并通过实验数据进行了验证。确定了 4 毫米半径、3 毫米厚的传感器满足定义的感应范围和灵敏度要求。制作了一个原型传感器,其具有 45kPa 正压和 6kPa 切向压力的压力范围。原理验证原型演示了如何将其集成到具有多轴感应能力的仪器化夹板中,并有可能为改进夹板提供临床实践信息。