Food Engineering Department, Technical University of Cartagena, 30203 Cartagena, Spain.
Aerospace Engineering and Fluid Mechanical Department, University of Seville, 41013 Seville, Spain.
Sensors (Basel). 2020 Mar 10;20(5):1541. doi: 10.3390/s20051541.
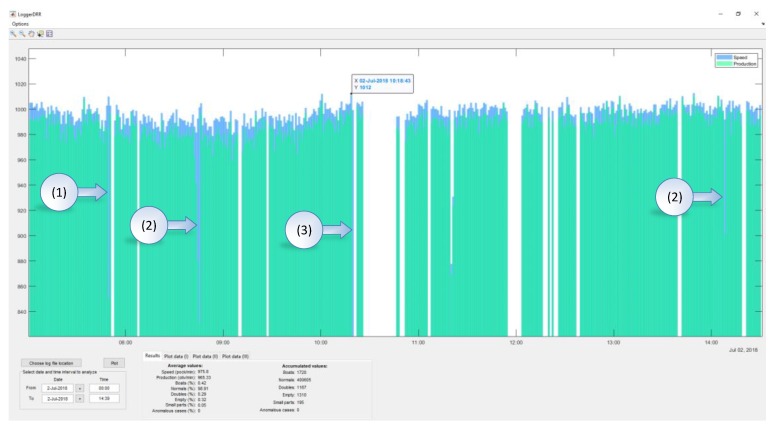
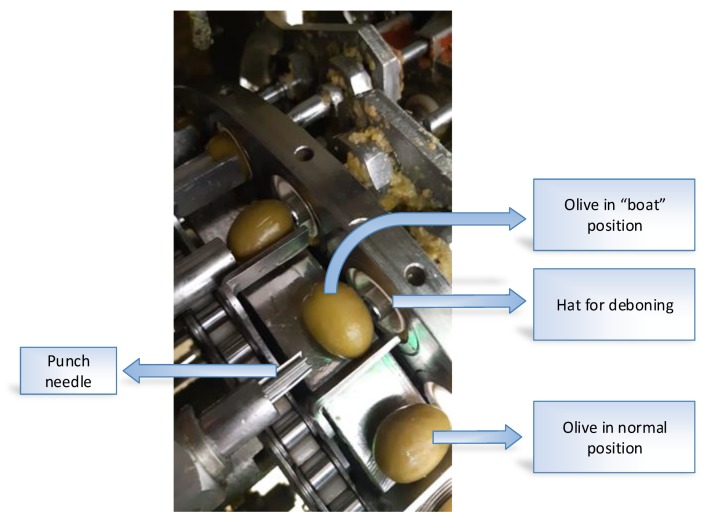
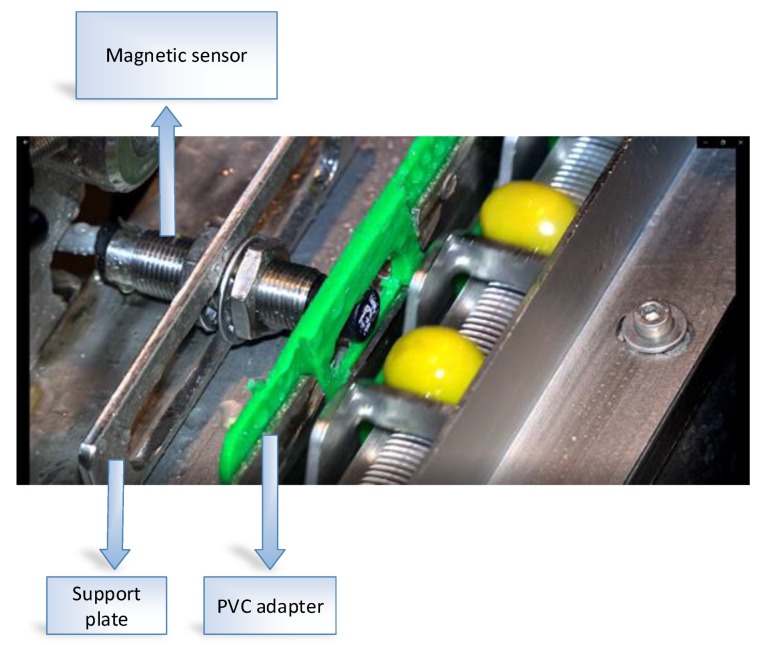
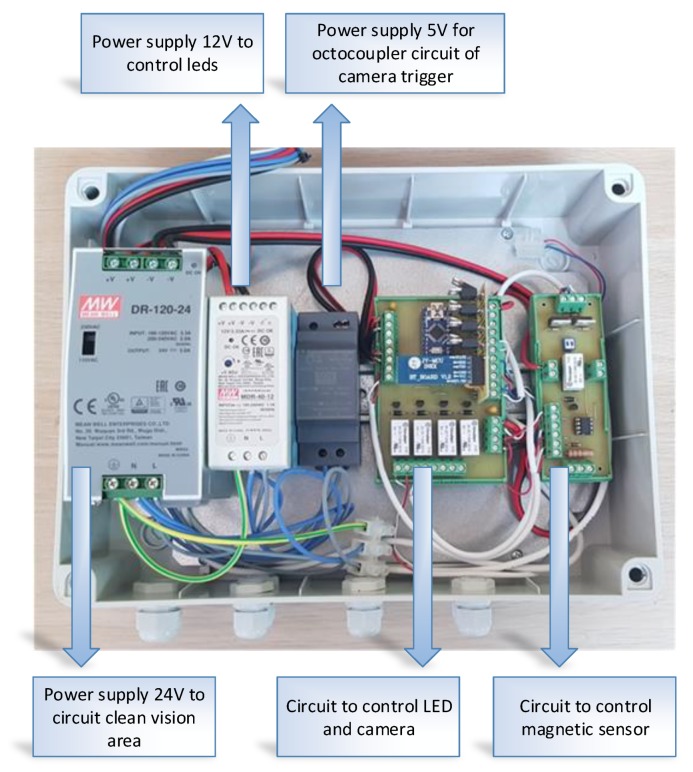
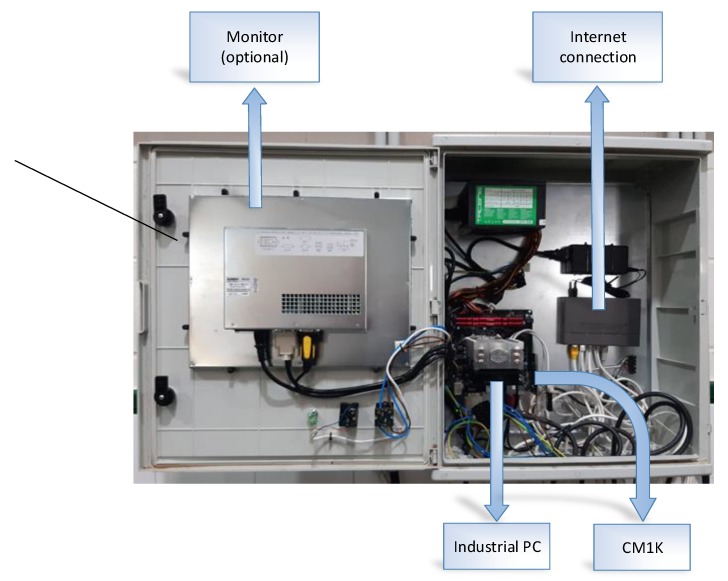
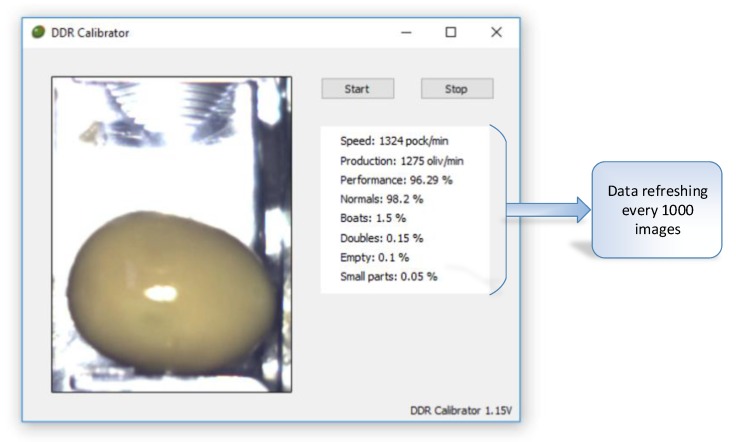
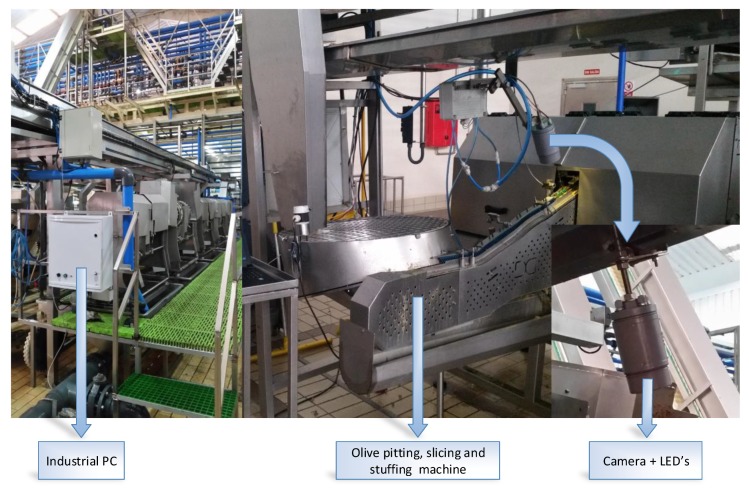
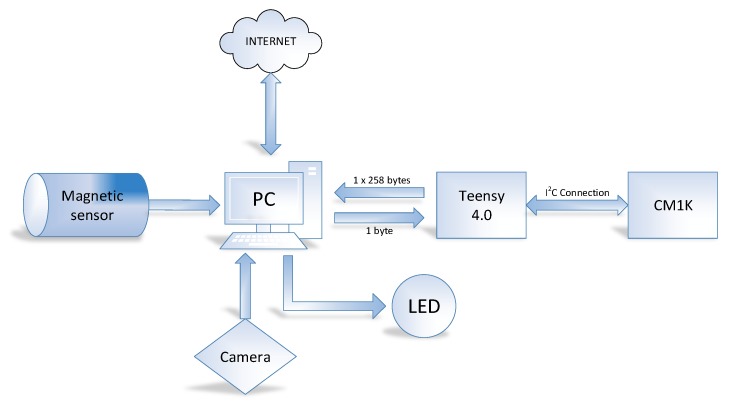
Olive pitting, slicing and stuffing machines (DRR in Spanish) are characterized by the fact that their optimal functioning is based on appropriate adjustments. Traditional systems are not completely reliable because their minimum error rate is 1-2%, which can result in fruit loss, since the pitting process is not infallible, and food safety issues can arise. Such minimum errors are impossible to remove through mechanical adjustments. In order to achieve this objective, an innovative solution must be provided in order to remove errors at operating speed rates over 2500 olives/min. This work analyzes the appropriate placement of olives in the pockets of the feed chain by using the following items: (1) An IoT System to control the DRR machine and the data analysis. (2) A computer vision system with an external shot camera and a LED lighting system, which takes a picture of every pocket passing in front of the camera. (3) A chip with a neural network for classification that, once trained, classifies between four possible pocket cases: empty, normal, incorrectly de-stoned olives at any angles (also known as a "boat"), and an anomalous case (foreign elements such as leafs, small branches or stones, two olives or small parts of olives in the same pocket). The main objective of this paper is to illustrate how with the use of a system based on IoT and a physical chip (NeuroMem CM1K, General Vision Inc.) with neural networks for sorting purposes, it is possible to optimize the functionality of this type of machine by remotely analyzing the data obtained. The use of classifying hardware allows it to work at the nominal operating speed for these machines. This would be limited if other classifying techniques based on software were used.
橄榄去核、切片和填充机(西班牙语中的 DRR)的特点是其最佳运行基于适当的调整。传统系统并不完全可靠,因为它们的最小错误率为 1-2%,这可能导致水果损失,因为去核过程并非万无一失,并且可能会出现食品安全问题。通过机械调整无法消除这种最小误差。为了实现这一目标,必须提供创新的解决方案,以便在超过 2500 个橄榄/分钟的运行速度下消除误差。这项工作通过使用以下项目来分析橄榄在进料链口袋中的适当位置:(1)一个用于控制 DRR 机器和数据分析的物联网系统。(2)一个带有外部拍摄相机和 LED 照明系统的计算机视觉系统,它会拍摄每个经过相机前面的口袋的照片。(3)一个带有神经网络的芯片,用于分类,一旦经过训练,就可以在四个可能的口袋案例之间进行分类:空的、正常的、以任何角度不正确去核的橄榄(也称为“船”)和异常情况(外来物,如叶子、小树枝或石头、两个橄榄或同一口袋中的橄榄小部分)。本文的主要目的是说明如何使用基于物联网的系统和带有神经网络的物理芯片(General Vision Inc. 的 NeuroMem CM1K)进行分类,通过远程分析获得的数据,可以优化这种机器的功能。使用分类硬件可以使其在这些机器的标称运行速度下工作。如果使用基于软件的其他分类技术,这将受到限制。