Computer Science and Engineering Department, Institute for Automotive Vehicle Safety (ISVA), Universidad Carlos III de Madrid, Avda. de la Universidad 30, 28911 Leganés, Madrid, Spain.
Mechanical Engineering Department, Institute for Automotive Vehicle Safety (ISVA), Universidad Carlos III de Madrid, Avda. de la Universidad 30, 28911 Leganés, Madrid, Spain.
Sensors (Basel). 2018 Jul 7;18(7):2188. doi: 10.3390/s18072188.
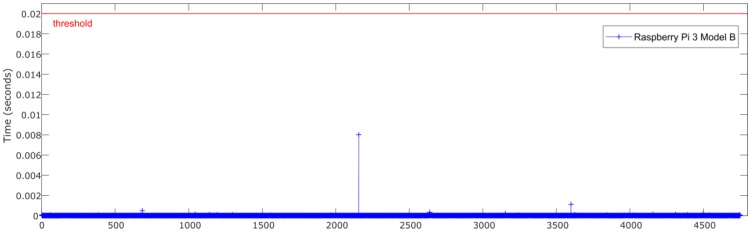
The high rate of vehicle-crash victims has a fatal economic and social impact in today’s societies. In particular, road crashes where heavy vehicles are involved cause more severe damage because they are prone to rollover. For this reason, many researches are focused on developing RSC Roll Stability Control (RSC) systems. Concerning the design of RSC systems with an adequate performance, it is mandatory to know the dynamics of the vehicle. The main problem arises from the lack of ability to directly capture several required dynamic vehicle variables, such as roll angle, from low-cost sensors. Previous studies demonstrate that low-cost sensors can provide data in real-time with the required precision and reliability. Even more, other research works indicate that neural networks are efficient mechanisms to estimate roll angle. Nevertheless, it is necessary to assess that the fusion of data coming from low-cost devices and estimations provided by neural networks can fulfill hard real-time processing constraints, achieving high level of accuracy during circulation of a vehicle in real situations. In order to address this issue, this study has two main goals: (1) Design and develop an IoT based architecture, integrating ANN in low cost kits with different hardware architectures in order to estimate under real-time constraints the vehicle roll angle. This architecture is able to work under high dynamic conditions, by following specific best practices and considerations during its design; (2) assess that the IoT architecture deployed in low-cost experimental kits achieve the hard real-time performance constraints estimating the roll angle with the required calculation accuracy. To fulfil these objectives, an experimental environment was set up, composed of a van with two set of low-cost kits, one including a Raspberry Pi 3 Model Band the other having an Intel Edison System on Chip linked to a SparkFun 9 Degrees of Freedom module. This experimental environment be tested in different maneuvers for comparison purposes. Neural networks embedded in low-cost sensor kits provide roll angle estimations highly approximated to real values. Even more, Intel Edison and Raspberry Pi 3 Model B have enough computing capabilities to successfully run roll angle estimation based on neural networks to determine rollover risk situations, fulfilling real-time operation restrictions stated for this problem.
当今社会,车辆碰撞事故受害者的高比率对经济和社会造成了致命影响。特别是涉及重型车辆的道路碰撞事故往往会造成更严重的破坏,因为它们容易翻车。出于这个原因,许多研究都集中在开发 RSC 侧翻稳定性控制(RSC)系统上。关于具有适当性能的 RSC 系统的设计,必须了解车辆的动力学。主要问题在于缺乏直接从低成本传感器获取几个所需车辆动态变量(如侧倾角)的能力。先前的研究表明,低成本传感器可以实时提供所需精度和可靠性的数据。更重要的是,其他研究工作表明,神经网络是估计侧倾角的有效机制。然而,有必要评估来自低成本设备的数据融合和神经网络提供的估计值是否能够满足硬实时处理的约束条件,从而在车辆在实际情况下行驶时实现高精度。为了解决这个问题,本研究有两个主要目标:(1)设计并开发一个基于物联网的架构,将 ANN 集成到具有不同硬件架构的低成本套件中,以便在实时约束下估计车辆的侧倾角。该架构能够在高动态条件下工作,遵循设计过程中的特定最佳实践和注意事项;(2)评估部署在低成本实验套件中的物联网架构是否能够满足硬实时性能约束,以所需的计算精度估计侧倾角。为了实现这些目标,建立了一个实验环境,该环境由一辆带有两组低成本套件的面包车组成,一组包括 Raspberry Pi 3 Model B,另一组则具有与 SparkFun 9 自由度模块相连的 Intel Edison System on Chip。为了进行比较,该实验环境将在不同的操作中进行测试。嵌入低成本传感器套件中的神经网络提供了高度接近真实值的侧倾角估计。此外,Intel Edison 和 Raspberry Pi 3 Model B 具有足够的计算能力,能够成功运行基于神经网络的侧倾角估计,以确定翻车风险情况,满足为该问题规定的实时操作限制。