Department of Electrical and Computer Engineering, University of New Brunswick, Canada.
Institute of Biomedical Engineering, University of New Brunswick, Canada.
Sensors (Basel). 2020 Mar 13;20(6):1613. doi: 10.3390/s20061613.
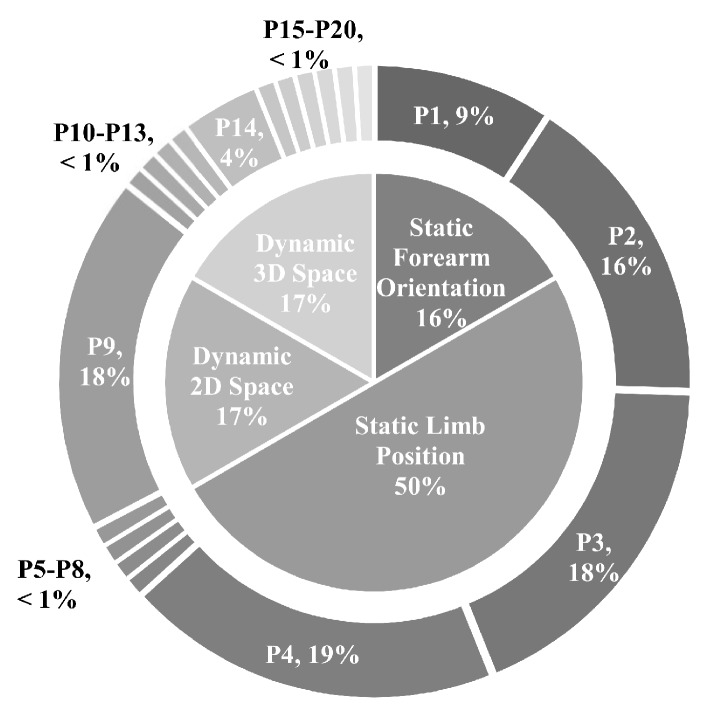
This manuscript presents a hybrid study of a comprehensive review and a systematic(research) analysis. Myoelectric control is the cornerstone ofmany assistive technologies used in clinicalpractice, such as prosthetics and orthoses, and human-computer interaction, such as virtual reality control.Although the classification accuracy of such devices exceeds 90% in a controlled laboratory setting,myoelectric devices still face challenges in robustness to variability of daily living conditions.The intrinsic physiological mechanisms limiting practical implementations of myoelectric deviceswere explored: the limb position effect and the contraction intensity effect. The degradationof electromyography (EMG) pattern recognition in the presence of these factors was demonstratedon six datasets, where classification performance was 13% and 20% lower than the controlledsetting for the limb position and contraction intensity effect, respectively. The experimental designsof limb position and contraction intensity literature were surveyed. Current state-of-the-art trainingstrategies and robust algorithms for both effects were compiled and presented. Recommendationsfor future limb position effect studies include: the collection protocol providing exemplars of at least 6positions (four limb positions and three forearm orientations), three-dimensional space experimentaldesigns, transfer learning approaches, and multi-modal sensor configurations. Recommendationsfor future contraction intensity effect studies include: the collection of dynamic contractions, nonlinearcomplexity features, and proportional control.
这篇手稿是一项综合回顾和系统分析的混合研究。肌电控制是许多临床实践中使用的辅助技术的基础,如假肢和矫形器以及人机交互,如虚拟现实控制。虽然这些设备的分类准确性在受控实验室环境中超过 90%,但肌电设备在日常生活条件变化的稳健性方面仍然面临挑战。探索了限制肌电设备实际应用的内在生理机制:肢体位置效应和收缩强度效应。在存在这些因素的情况下,对六个数据集进行了肌电图 (EMG) 模式识别的退化证明,其中肢体位置和收缩强度效应的分类性能分别比受控设置低 13%和 20%。调查了肢体位置和收缩强度文献的实验设计。编译并介绍了针对这两种效应的最新训练策略和稳健算法。未来肢体位置效应研究的建议包括:提供至少 6 个位置(四个肢体位置和三个前臂方向)示例的收集协议、三维空间实验设计、迁移学习方法和多模态传感器配置。未来收缩强度效应研究的建议包括:动态收缩、非线性复杂性特征和比例控制的采集。