Instituto de Ciencias del Mar (ICM-CSIC), E-08003 Barcelona, Spain.
Stazione Zoologica Anton Dohrn, 80122 Naples, Italy.
Sensors (Basel). 2020 Mar 13;20(6):1614. doi: 10.3390/s20061614.
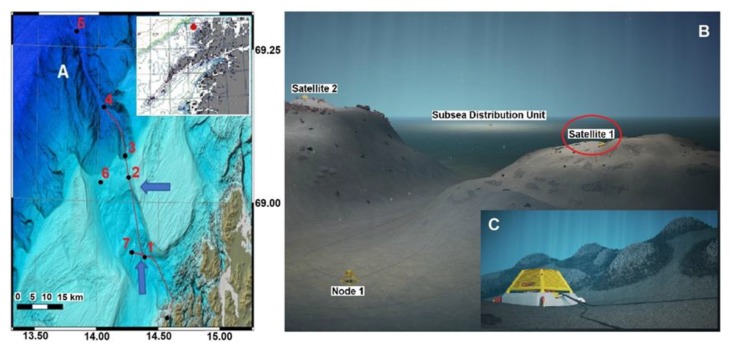
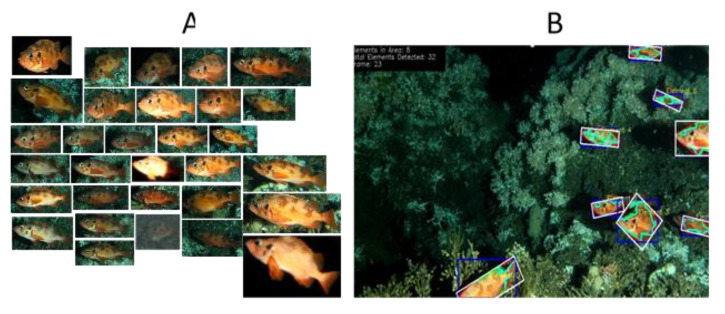
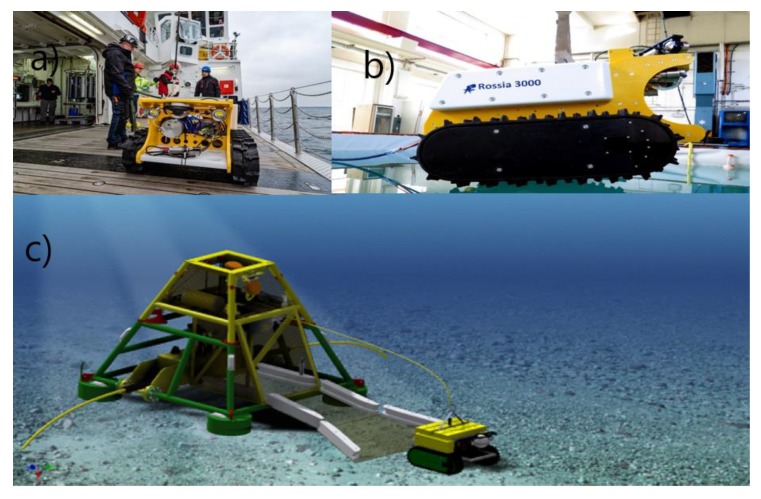
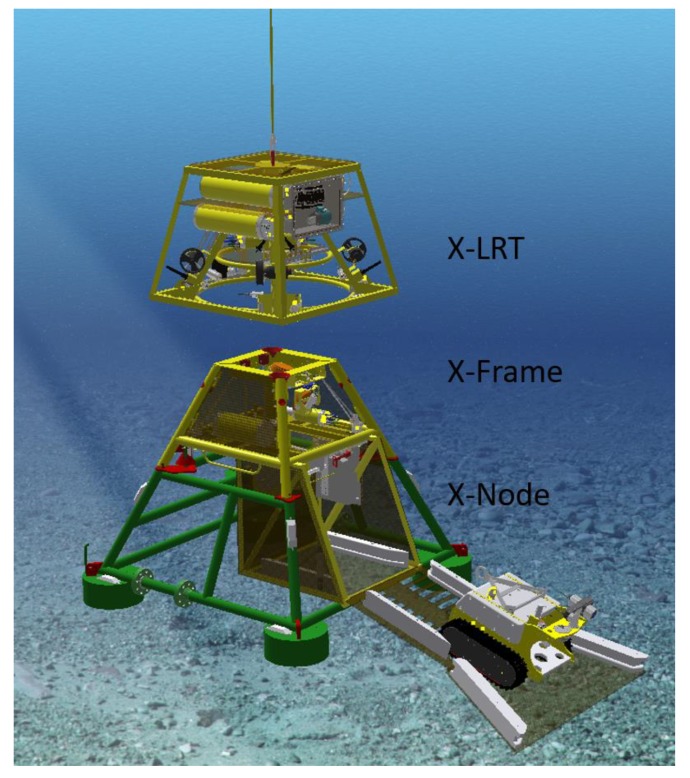
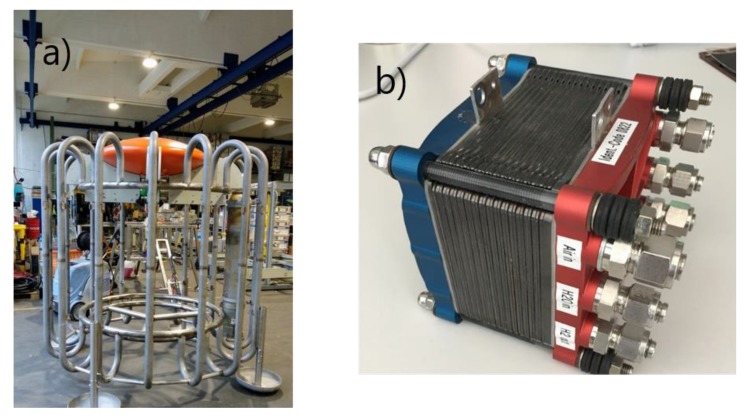
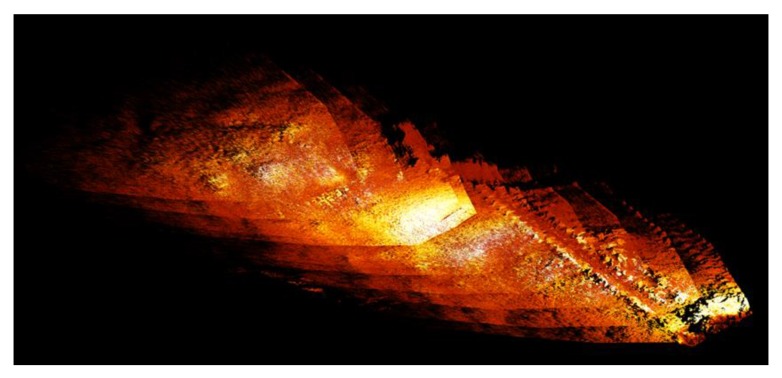
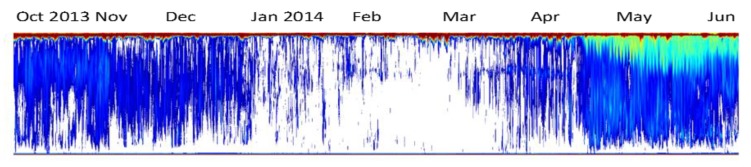
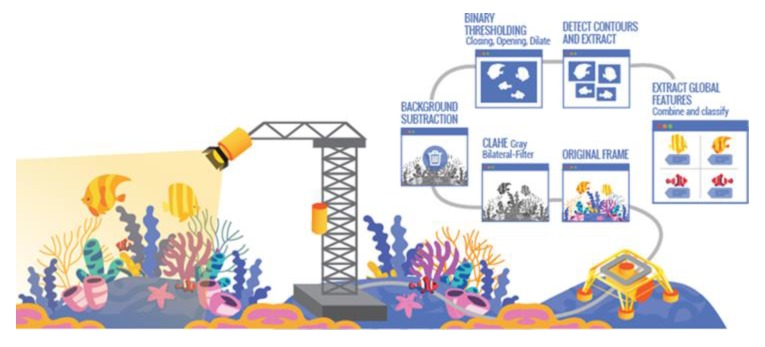
This paper presents the technological developments and the policy contexts for the project "Autonomous Robotic Sea-Floor Infrastructure for Bentho-Pelagic Monitoring" (ARIM). The development is based on the national experience with robotic component technologies that are combined and merged into a new product for autonomous and integrated ecological deep-sea monitoring. Traditional monitoring is often vessel-based and thus resource demanding. It is economically unviable to fulfill the current policy for ecosystem monitoring with traditional approaches. Thus, this project developed platforms for bentho-pelagic monitoring using an arrangement of crawler and stationary platforms at the Lofoten-Vesterålen (LoVe) observatory network (Norway). Visual and acoustic imaging along with standard oceanographic sensors have been combined to support advanced and continuous spatial-temporal monitoring near cold water coral mounds. Just as important is the automatic processing techniques under development that have been implemented to allow species (or categories of species) quantification (i.e., tracking and classification). At the same time, real-time outboard processed three-dimensional (3D) laser scanning has been implemented to increase mission autonomy capability, delivering quantifiable information on habitat features (i.e., for seascape approaches). The first version of platform autonomy has already been tested under controlled conditions with a tethered crawler exploring the vicinity of a cabled stationary instrumented garage. Our vision is that elimination of the tether in combination with inductive battery recharge trough fuel cell technology will facilitate self-sustained long-term autonomous operations over large areas, serving not only the needs of science, but also sub-sea industries like subsea oil and gas, and mining.
本文介绍了“自主机器人海底基础设施的底栖-洄游监测”(ARIM)项目的技术发展和政策背景。该开发基于国家在机器人组件技术方面的经验,这些技术被组合和合并为一种用于自主和综合生态深海监测的新产品。传统监测通常是基于船只的,因此需要大量资源。用传统方法来满足当前的生态系统监测政策在经济上是不可行的。因此,该项目利用在罗弗敦-韦斯特朗(LoVe)观测站网络(挪威)的爬行器和固定平台的布置,为底栖-洄游监测开发了平台。视觉和声学成像以及标准海洋传感器已被结合在一起,以支持冷水珊瑚丘附近的高级和连续的时空监测。同样重要的是正在开发的自动处理技术,这些技术已被实施以允许对物种(或物种类别)进行定量(即跟踪和分类)。与此同时,实时外部处理的三维(3D)激光扫描已经被实施,以提高任务自主性能力,提供有关栖息地特征的可量化信息(即,用于海景方法)。平台自主性的第一个版本已经在受控条件下进行了测试,使用系留爬行器探索带有电缆的固定仪器车库的附近区域。我们的愿景是,消除系留和结合感应电池充电槽燃料电池技术将促进在大面积上实现自我维持的长期自主运行,不仅满足科学需求,还满足海底石油和天然气以及采矿等海底产业的需求。