Lee Kidong, Hwang Insung, Kim Young-Min, Lee Huijun, Kang Munjin, Yu Jiyoung
Joining R & D Group, Korea Institute of Industrial Technology, 156 Gaetbeol-ro, Yeonsu-Gu, Incheon 21999, Korea.
Monisys Co., Ltd., 775, Gyeongin-ro, Yeongdeungpo-Gu, Seoul 07299, Korea.
Sensors (Basel). 2020 Mar 14;20(6):1625. doi: 10.3390/s20061625.
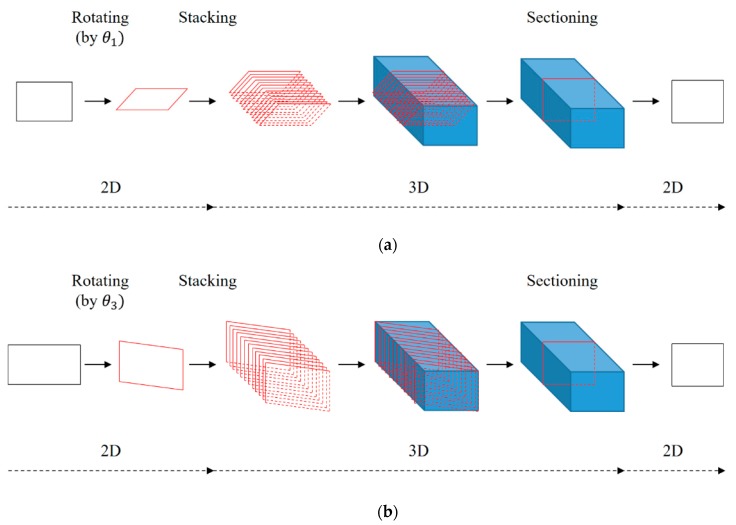
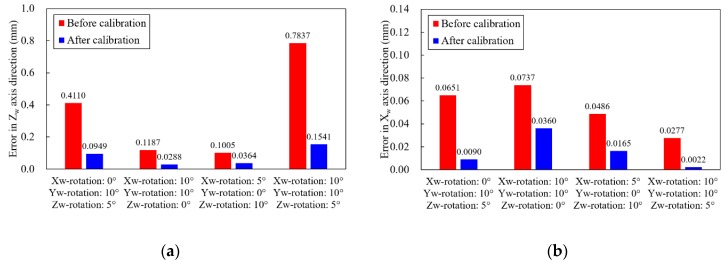
Nondestructive test (NDT) technology is required in the gas metal arc (GMA) welding process to secure weld robustness and to monitor the welding quality in real-time. In this study, a laser vision sensor (LVS) is designed and fabricated, and an image processing algorithm is developed and implemented to extract precise laser lines on tested welds. A camera calibration method based on a gyro sensor is used to cope with the complex motion of the welding robot. Data are obtained based on GMA welding experiments at various welding conditions for the estimation of quality prediction models. Deep neural network (DNN) models are developed based on external bead shapes and welding conditions to predict the internal bead shapes and the tensile strengths of welded joints.
在气体保护金属电弧焊(GMAW)过程中,需要无损检测(NDT)技术来确保焊接的稳健性并实时监测焊接质量。在本研究中,设计并制造了一种激光视觉传感器(LVS),并开发和实施了一种图像处理算法,以在测试焊缝上提取精确的激光线。采用基于陀螺传感器的相机校准方法来应对焊接机器人的复杂运动。基于不同焊接条件下的GMAW焊接实验获取数据,用于估计质量预测模型。基于外部焊缝形状和焊接条件开发深度神经网络(DNN)模型,以预测内部焊缝形状和焊接接头的抗拉强度。