Department of Industrial Engineering of Florence, University of Florence, Via di S. Marta 3, 50139 Firenze, Italy.
Sensors (Basel). 2020 Mar 19;20(6):1726. doi: 10.3390/s20061726.
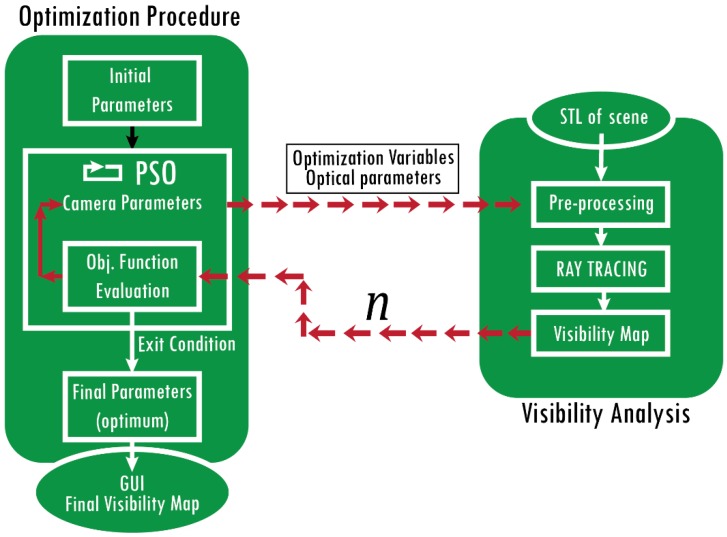
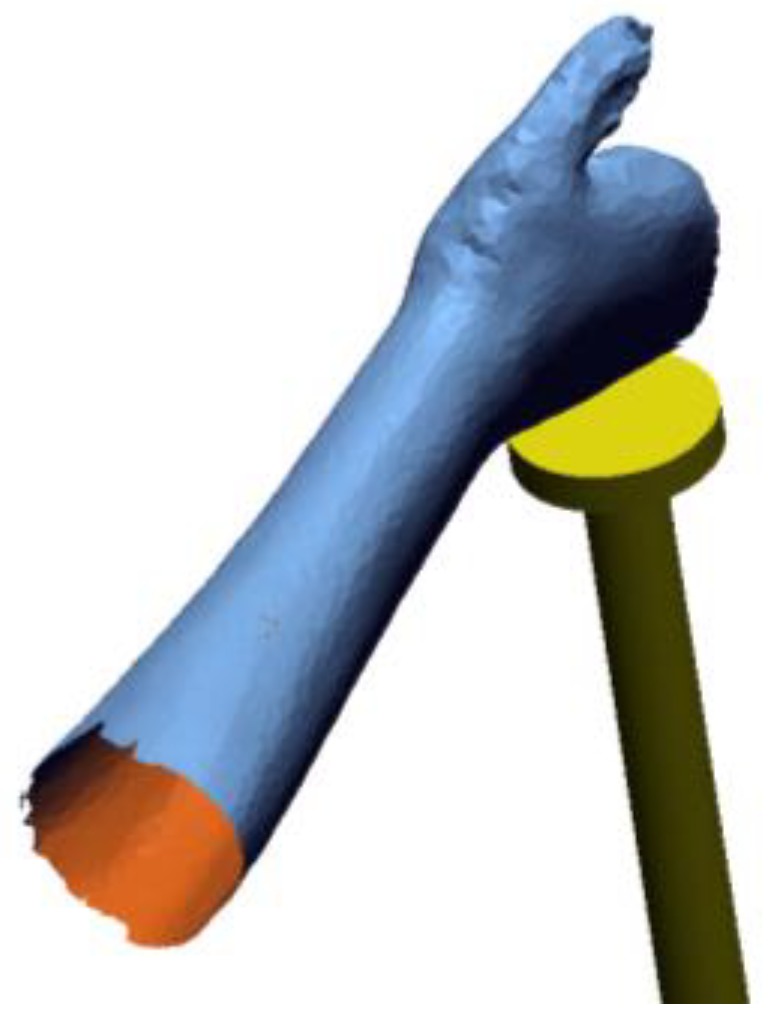
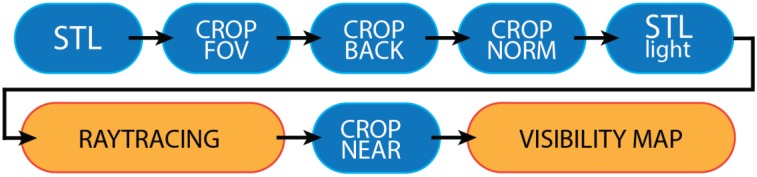
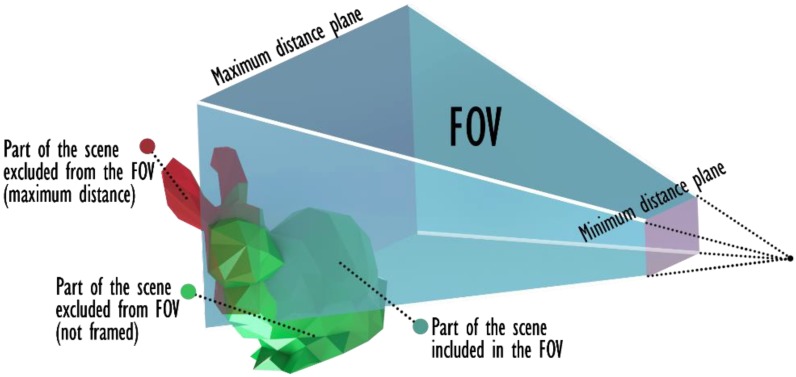
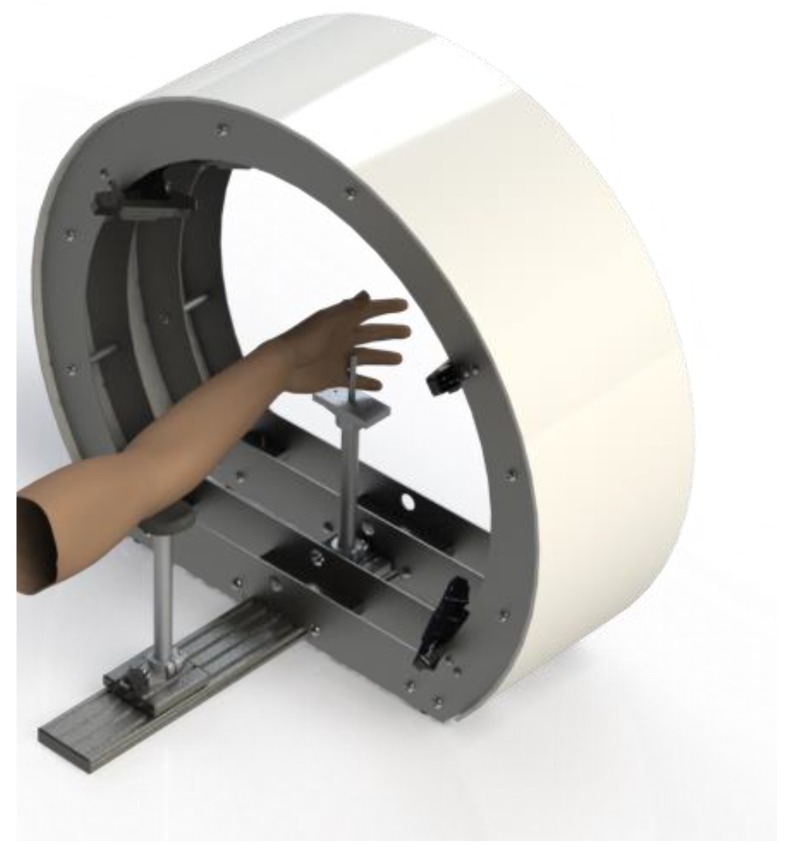
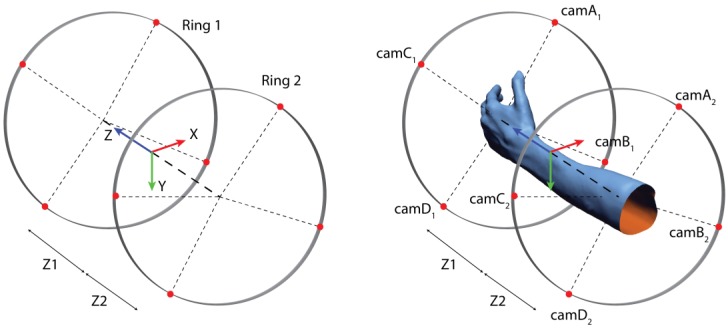
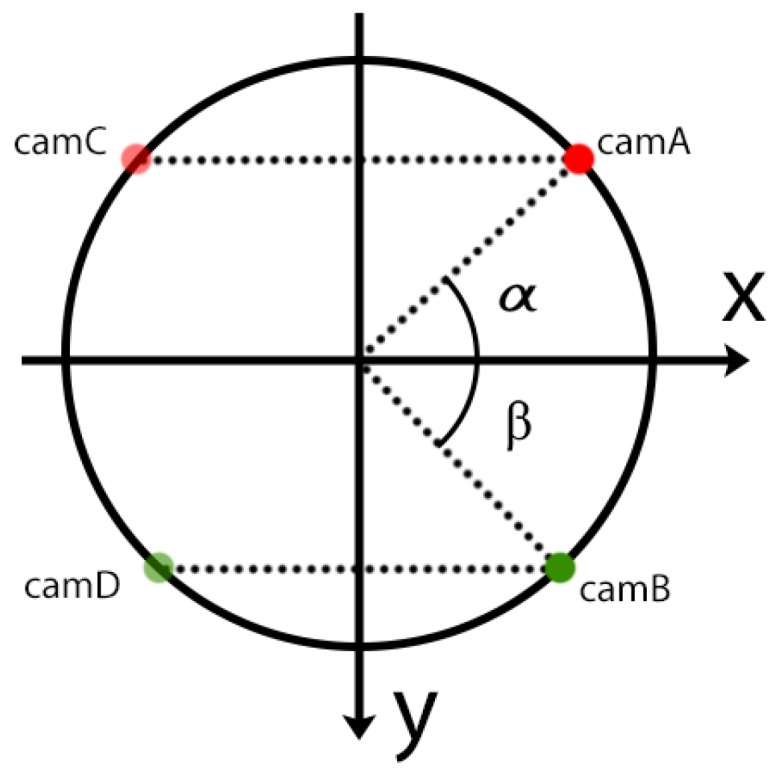
Designing an acquisition system for 2D or 3D information, based on the integration of data provided by different sensors is a task that requires a labor-intensive initial design phase. Indeed, the definition of the architecture of such acquisition systems needs to start from the identification of the position and orientation of the sensors observing the scene. Their placement is carefully studied to enhance the efficacy of the system. This often coincides with the need to maximize the surfaces observed by the sensors or some other metric. An automatic optimization procedure based on the Particle Swarm Optimization (PSO) algorithm, to seek the most convenient setting of multiple optical sensors observing a 3D scene, is proposed. The procedure has been developed to provide a fast and efficient tool for 2D and 3D data acquisition. Three different objective functions of general validity, to be used in future applications, are proposed and described in the text. Various filters are introduced to reduce computational times of the whole procedure. The method is capable of handling occlusions from undesired obstacle in the scene. Finally, the entire method is discussed with reference to 1) the development of a body scanner for the arm-wrist-hand district and 2) the acquisition of an internal environment as case studies.
设计二维或三维信息的采集系统,基于不同传感器提供的数据的集成,是一项需要大量初始设计阶段的任务。事实上,这样的采集系统的架构的定义需要从识别观察场景的传感器的位置和方向开始。它们的放置被仔细研究,以提高系统的功效。这通常与需要最大化传感器观察到的表面或其他一些指标相一致。提出了一种基于粒子群优化(PSO)算法的自动优化程序,以寻求观察三维场景的多个光学传感器的最方便设置。该过程已被开发为提供二维和三维数据采集的快速有效的工具。本文提出并描述了三种不同的通用有效性的目标函数,用于未来的应用。各种滤波器被引入以减少整个过程的计算时间。该方法能够处理场景中不期望的障碍物的遮挡。最后,参考 1)手臂-手腕-手部区域的身体扫描仪的开发和 2)内部环境的采集,对整个方法进行了讨论。