Department of Industrial Engineering, University of Florence, Via Santa Marta 3, 50139 Florence, Italy.
Sensors (Basel). 2021 Nov 22;21(22):7770. doi: 10.3390/s21227770.
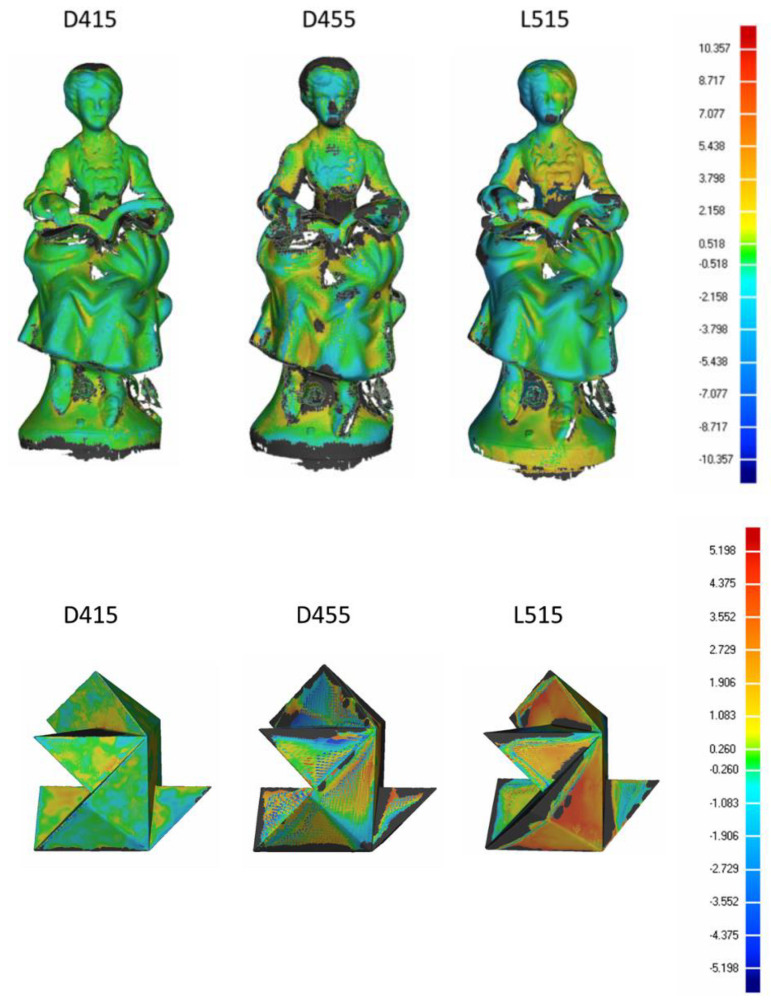
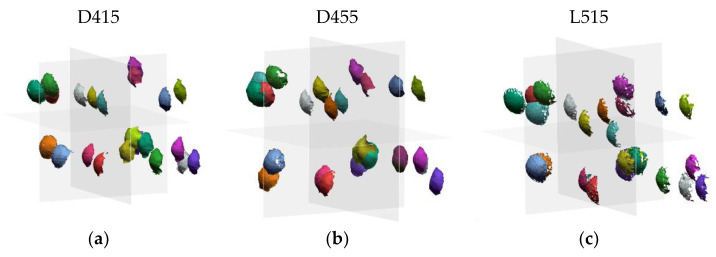
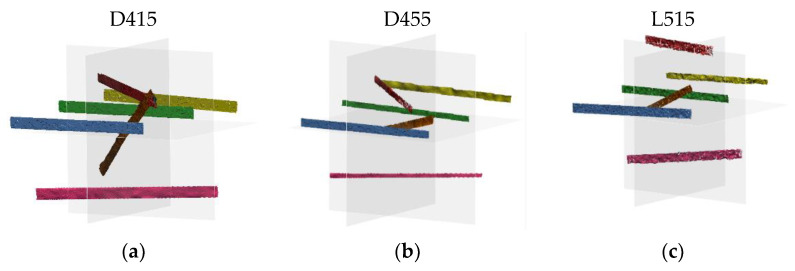
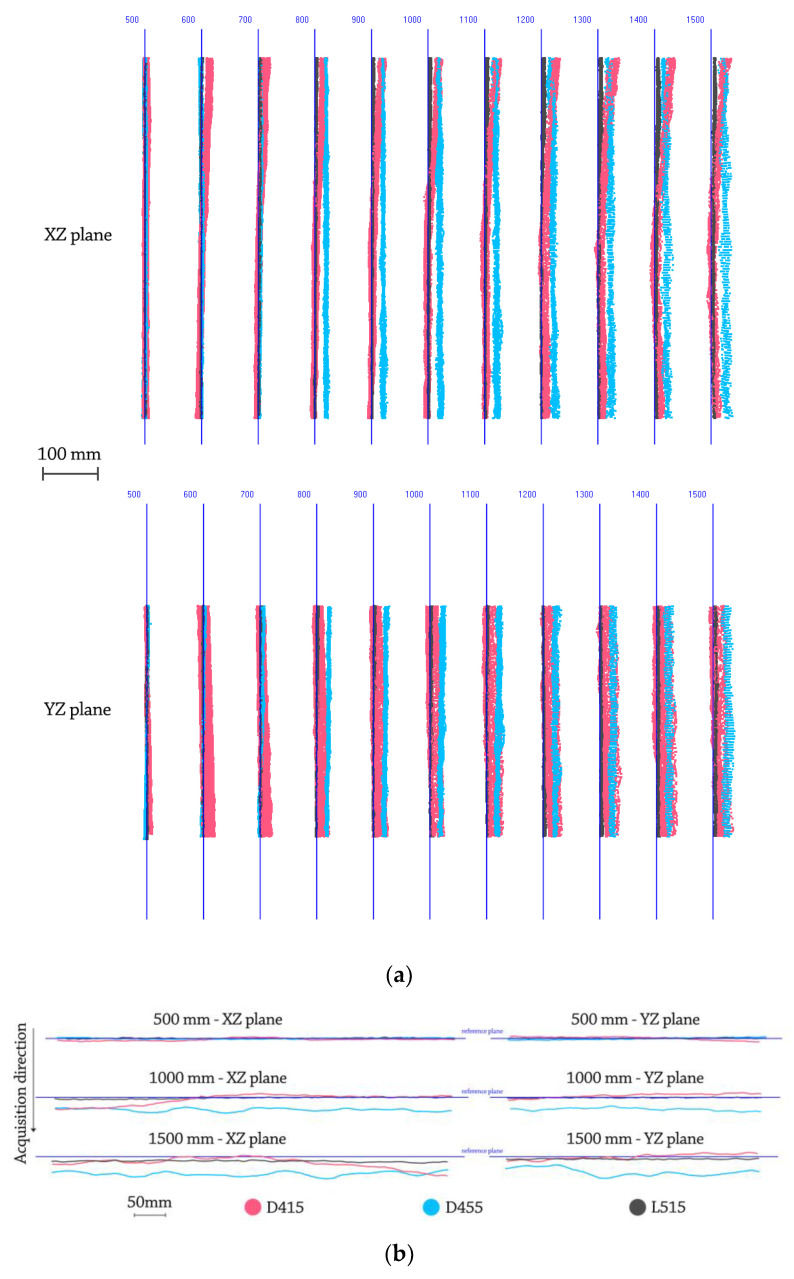
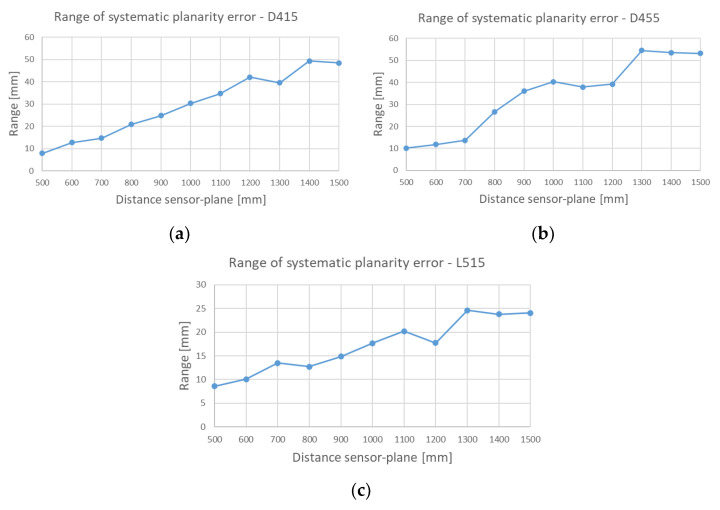
RGB-D cameras are employed in several research fields and application scenarios. Choosing the most appropriate sensor has been made more difficult by the increasing offer of available products. Due to the novelty of RGB-D technologies, there was a lack of tools to measure and compare performances of this type of sensor from a metrological perspective. The recent ISO 10360-13:2021 represents the most advanced international standard regulating metrological characterization of coordinate measuring systems. Part 13, specifically, considers 3D optical sensors. This paper applies the methodology of ISO 10360-13 for the characterization and comparison of three RGB-D cameras produced by Intel RealSense™ (D415, D455, L515) in the close range (100-1500 mm). ISO 10360-13 procedures, which focus on metrological performances, are integrated with additional tests to evaluate systematic errors (acquisition of flat objects, 3D reconstruction of objects). The present paper proposes an off-the-shelf comparison which considers the performance of the sensors throughout their acquisition volume. Results have exposed the strengths and weaknesses of each device. The D415 device showed better reconstruction quality on tests strictly related to the short range. The L515 device performed better on systematic depth errors; finally, the D455 device achieved better results on tests related to the standard.
RGB-D 相机在多个研究领域和应用场景中得到了应用。由于可用产品的不断增加,选择最合适的传感器变得更加困难。由于 RGB-D 技术的新颖性,缺乏从计量学角度测量和比较这种传感器性能的工具。最近的 ISO 10360-13:2021 是规范坐标测量系统计量特性的最先进的国际标准。第 13 部分专门考虑了 3D 光学传感器。本文应用 ISO 10360-13 的方法对英特尔 RealSense ™(D415、D455、L515)生产的三种 RGB-D 相机在近距离(100-1500mm)进行了特性描述和比较。侧重于计量性能的 ISO 10360-13 程序与评估系统误差的附加测试(采集平面物体、物体的 3D 重建)相结合。本文提出了一种现成的比较,考虑了传感器在整个采集体积内的性能。结果揭示了每个设备的优缺点。D415 设备在与短距离严格相关的测试中显示出更好的重建质量。L515 设备在系统深度误差方面表现更好;最后,D455 设备在与标准相关的测试中取得了更好的结果。