Mu Zaile, Zhang Qiuju, Yang Guo-Yuan, Xie Le, Fang Juan
School of Mechanical Engineering, Jiangnan University, Wuxi, China.
Med-X Research Institute and School of Biomedical Engineering, Shanghai Jiao Tong University, Shanghai, China.
Front Neurorobot. 2020 Apr 22;14:17. doi: 10.3389/fnbot.2020.00017. eCollection 2020.
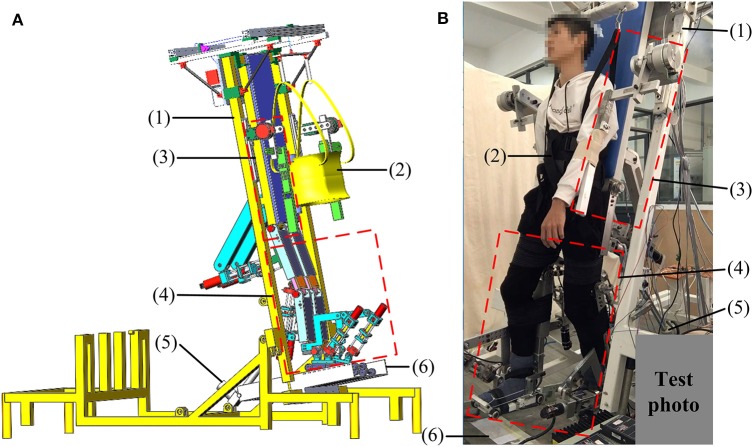
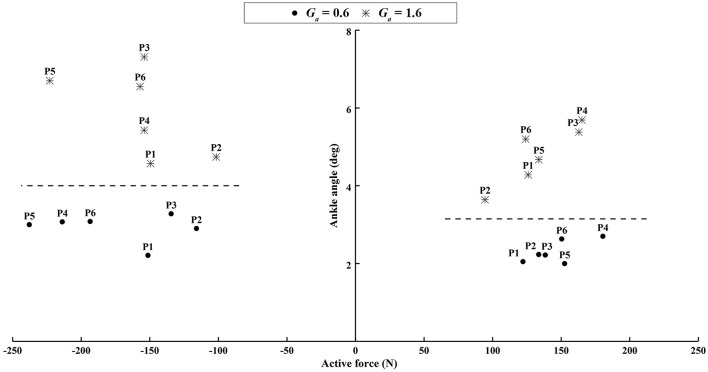
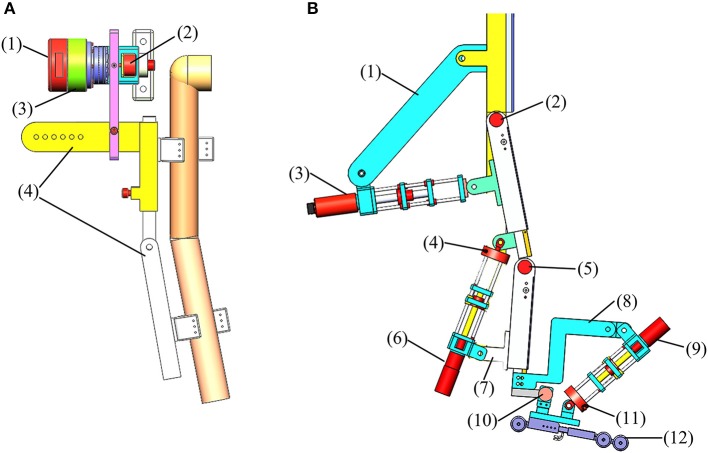
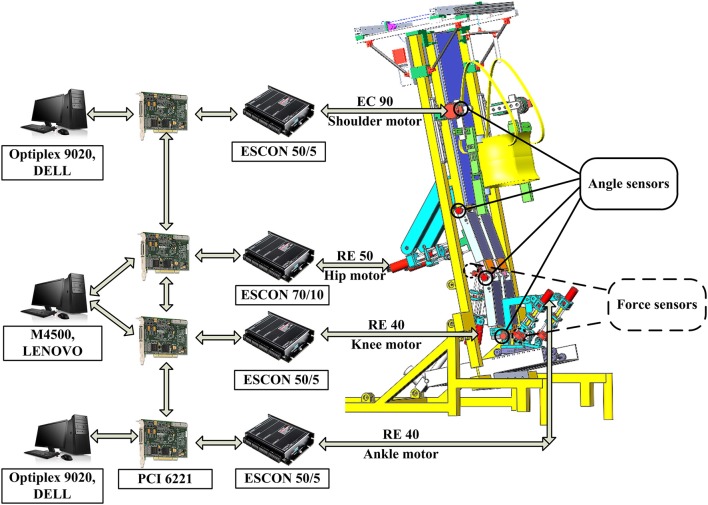
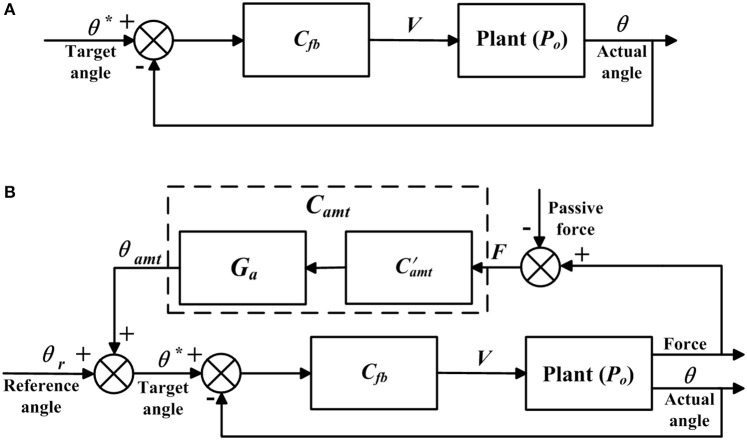
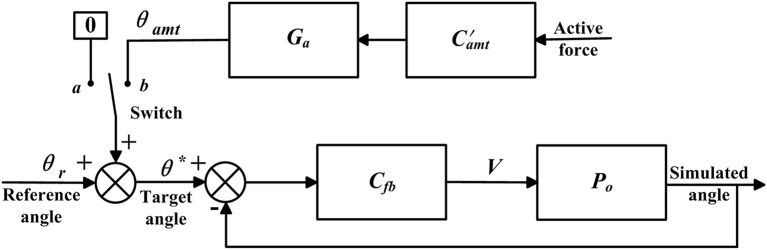
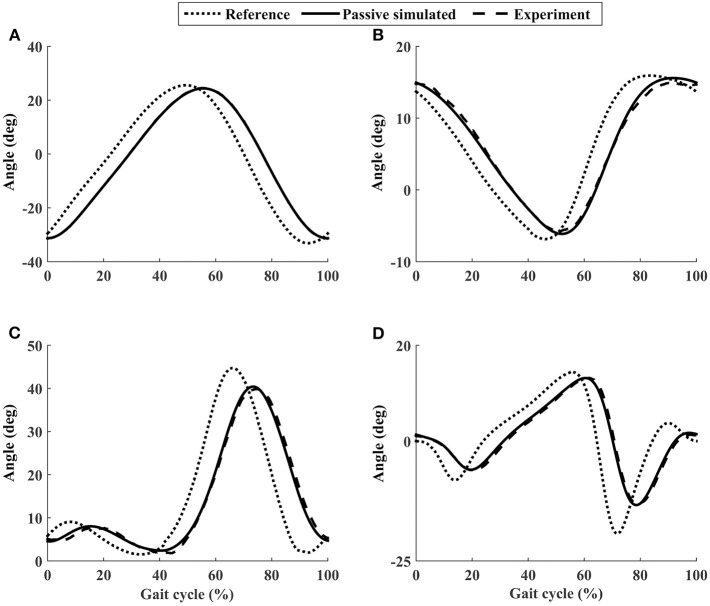
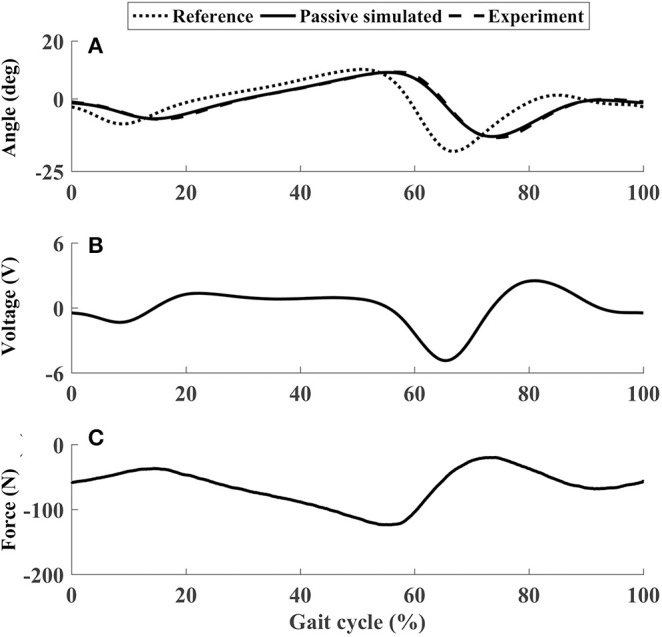
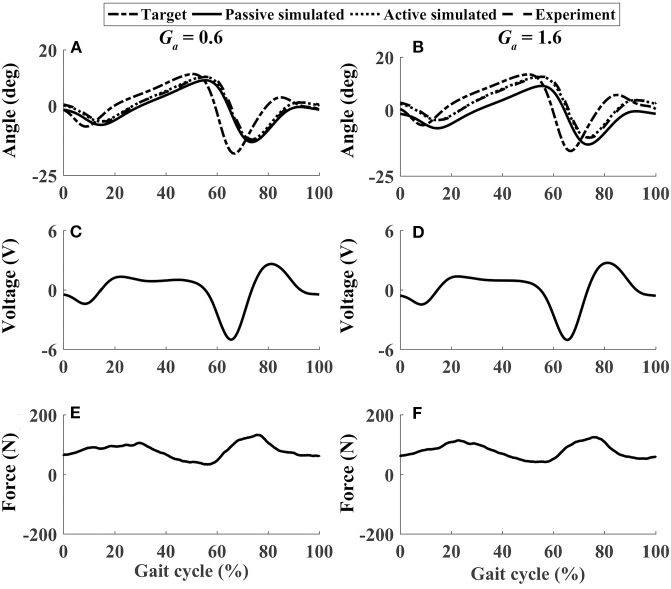
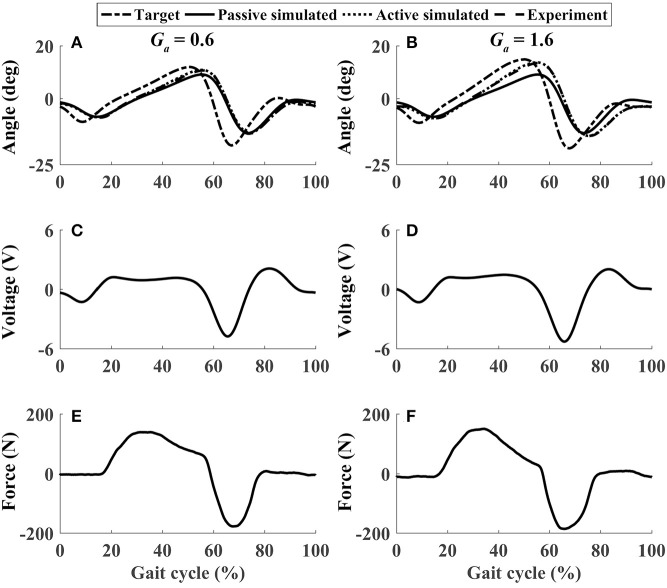
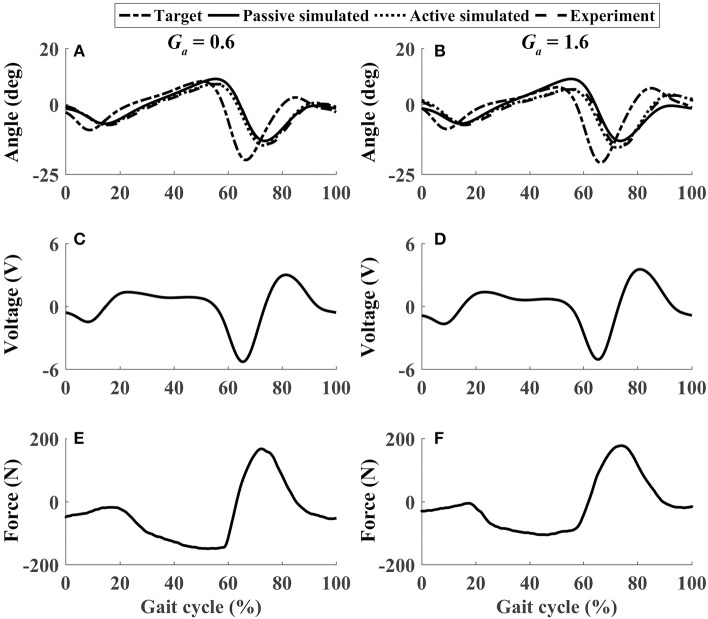
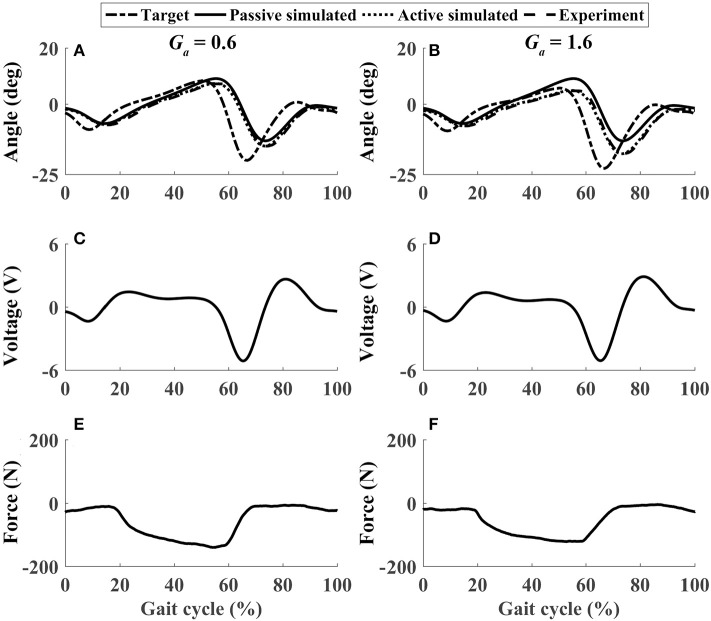
Based on interlimb neural coupling, gait robotic systems should produce walking-like movement in both upper and lower limbs for effective walking restoration. Two orthoses were previously designed in our lab to provide passive walking with arm swing. However, an active system for walking with arm swing is desirable to serve as a testbed for investigation of interlimb neural coupling in response to voluntary input. Given the important function of the ankle joint during normal walking, this work aimed to develop an improved rotational orthosis for walking with arm swing, which is called ROWAS II, and especially to develop and evaluate the algorithms for active ankle control. After description of the mechanical structure and control schemes of the overall ROWAS II system, the closed-loop position control and adjustable admittance control algorithms were firstly deduced, then simulated in Matlab/Simulink and finally implemented in the ROWAS II system. Six able-bodied participants were recruited to use the ROWAS II system in passive mode, and then to estimate the active ankle mechanism. It was showed that the closed-loop position control algorithms enabled the ROWAS II system to track the target arm-leg walking movement patterns well in passive mode, with the tracking error of each joint <0.7°. The adjustable admittance control algorithms enabled the participants to voluntarily adjust the ankle movement by exerting various active force. Higher admittance gains enabled the participants to more easily adjust the movement trajectory of the ankle mechanism. The ROWAS II system is technically feasible to produce walking-like movement in the bilateral upper and lower limbs in passive mode, and the ankle mechanism has technical potential to provide various active ankle training during gait rehabilitation. This novel ROWAS II system can serve as a testbed for further investigation of interlimb neural coupling in response to voluntary ankle movement and is technically feasible to provide a new training paradigm of walking with arm swing and active ankle control.
基于肢体间神经耦合,步态机器人系统应在上肢和下肢产生类似行走的运动,以实现有效的步行恢复。我们实验室之前设计了两种矫形器,以实现带有摆臂的被动行走。然而,一种用于带有摆臂行走的主动系统对于作为研究肢体间神经耦合对自主输入响应的试验平台是很有必要的。鉴于踝关节在正常行走中的重要作用,这项工作旨在开发一种改进的用于带有摆臂行走的旋转矫形器,即ROWAS II,尤其要开发并评估主动踝关节控制算法。在描述了整个ROWAS II系统的机械结构和控制方案后,首先推导了闭环位置控制和可调导纳控制算法,然后在Matlab/Simulink中进行仿真,最后在ROWAS II系统中实现。招募了六名身体健全的参与者,让他们在被动模式下使用ROWAS II系统,然后评估主动踝关节机制。结果表明,闭环位置控制算法使ROWAS II系统在被动模式下能够很好地跟踪目标手臂 - 腿部行走运动模式,每个关节的跟踪误差<0.7°。可调导纳控制算法使参与者能够通过施加各种主动力来自主调节踝关节运动。更高的导纳增益使参与者能够更轻松地调节踝关节机制的运动轨迹。ROWAS II系统在技术上可行,能够在被动模式下在双侧上肢和下肢产生类似行走的运动,并且踝关节机制在技术上有潜力在步态康复期间提供各种主动踝关节训练。这种新型的ROWAS II系统可以作为进一步研究肢体间神经耦合对自主踝关节运动响应的试验平台,并且在技术上可行,能够提供一种带有摆臂和主动踝关节控制的新型行走训练范式。