School of Mechanical Engineering, Sungkyunkwan University, Suwon 16419, Korea.
Sensors (Basel). 2020 May 9;20(9):2699. doi: 10.3390/s20092699.
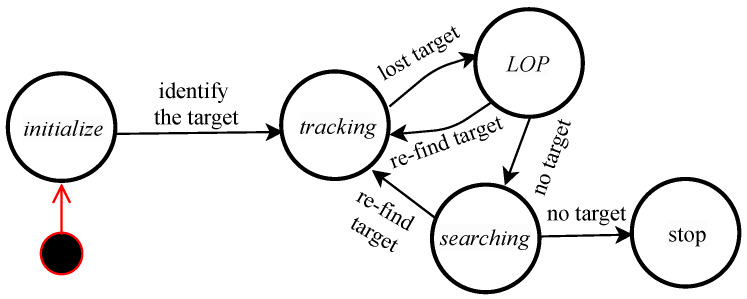
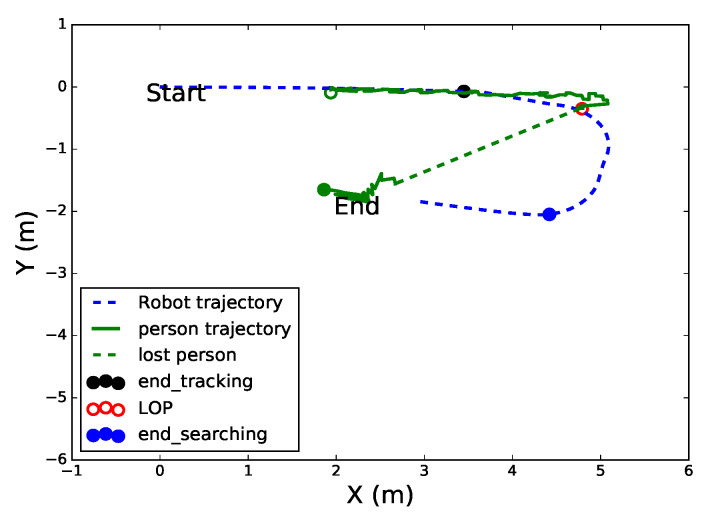
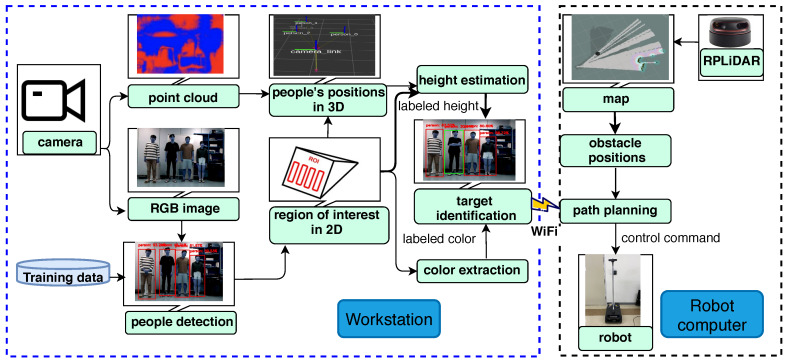
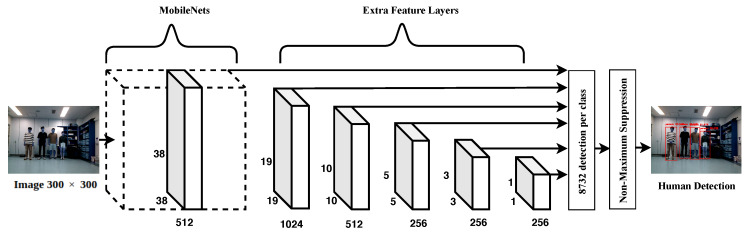
Human following is one of the fundamental functions in human-robot interaction for mobile robots. This paper shows a novel framework with state-machine control in which the robot tracks the target person in occlusion and illumination changes, as well as navigates with obstacle avoidance while following the target to the destination. People are detected and tracked using a deep learning algorithm, called Single Shot MultiBox Detector, and the target person is identified by extracting the color feature using the hue-saturation-value histogram. The robot follows the target safely to the destination using a simultaneous localization and mapping algorithm with the LIDAR sensor for obstacle avoidance. We performed intensive experiments on our human following approach in an indoor environment with multiple people and moderate illumination changes. Experimental results indicated that the robot followed the target well to the destination, showing the effectiveness and practicability of our proposed system in the given environment.
人在跟随是移动机器人人机交互的基本功能之一。本文展示了一种新的框架,采用状态机控制,机器人在遮挡和光照变化的情况下跟踪目标人,并在跟随目标人前往目的地的同时进行避障导航。使用称为单步多盒检测器的深度学习算法检测和跟踪人,通过提取色调-饱和度-值直方图的颜色特征来识别目标人。机器人使用激光雷达传感器进行同时定位和映射算法进行避障,安全地跟随目标人前往目的地。我们在具有多个人和适度光照变化的室内环境中对我们的人在跟随方法进行了密集实验。实验结果表明,机器人很好地跟随目标人到达目的地,展示了我们在给定环境中的系统的有效性和实用性。