Center for Bionics and Pain Research, Mölndal, Sweden.
Department of Electrical Engineering, Chalmers University of Technology, Gothenburg, Sweden.
Sci Rep. 2020 Jul 16;10(1):11793. doi: 10.1038/s41598-020-67985-5.
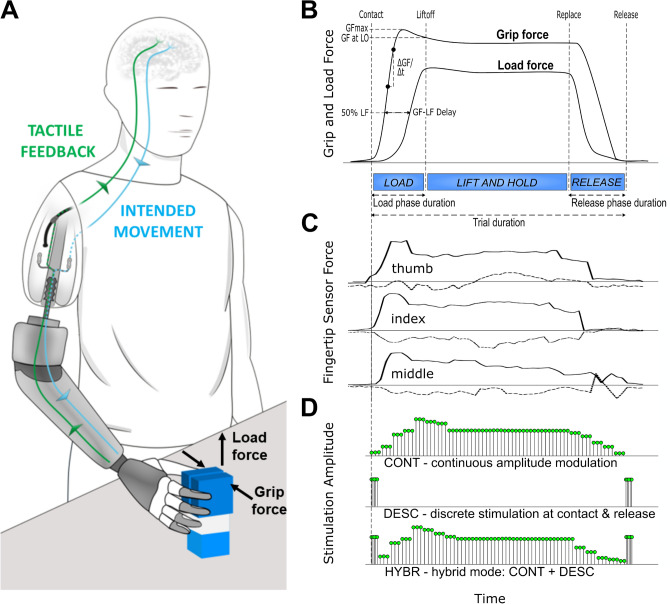
Conventional prosthetic arms suffer from poor controllability and lack of sensory feedback. Owing to the absence of tactile sensory information, prosthetic users must rely on incidental visual and auditory cues. In this study, we investigated the effect of providing tactile perception on motor coordination during routine grasping and grasping under uncertainty. Three transhumeral amputees were implanted with an osseointegrated percutaneous implant system for direct skeletal attachment and bidirectional communication with implanted neuromuscular electrodes. This neuromusculoskeletal prosthesis is a novel concept of artificial limb replacement that allows to extract control signals from electrodes implanted on viable muscle tissue, and to stimulate severed afferent nerve fibers to provide somatosensory feedback. Subjects received tactile feedback using three biologically inspired stimulation paradigms while performing a pick and lift test. The grasped object was instrumented to record grasping and lifting forces and its weight was either constant or unexpectedly changed in between trials. The results were also compared to the no-feedback control condition. Our findings confirm, in line with the neuroscientific literature, that somatosensory feedback is necessary for motor coordination during grasping. Our results also indicate that feedback is more relevant under uncertainty, and its effectiveness can be influenced by the selected neuromodulation paradigm and arguably also the prior experience of the prosthesis user.
传统的假肢手臂存在控制性能差和缺乏感觉反馈的问题。由于缺乏触觉感觉信息,假肢使用者必须依靠偶然的视觉和听觉提示。在这项研究中,我们研究了在常规抓握和不确定情况下抓握时提供触觉感知对运动协调的影响。三名肱骨截肢者被植入了一种骨整合经皮植入系统,用于与植入的神经肌肉电极进行直接骨骼附着和双向通信。这种神经肌肉骨骼假肢是一种人工肢体替代的新概念,它允许从植入在有活力的肌肉组织上的电极中提取控制信号,并刺激切断的传入神经纤维以提供躯体感觉反馈。在进行挑取和提升测试时,受试者通过三种生物启发的刺激范式接收触觉反馈。所抓取的物体被仪器化以记录抓取和提升力,并且其重量在试验之间要么是恒定的,要么是意外变化的。结果还与无反馈控制条件进行了比较。我们的研究结果证实了神经科学文献中的观点,即触觉反馈对于抓握过程中的运动协调是必要的。我们的研究结果还表明,在不确定的情况下,反馈更为重要,其有效性可以受到所选神经调节范式的影响,也可以受到假肢使用者的先前经验的影响。