Zhu Lingfeng, Wang Yancheng, Mei Deqing, Jiang Chengpeng
State Key Laboratory of Fluid Power and Mechatronic Systems, School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China.
Key Laboratory of Advanced Manufacturing Technology of Zhejiang Province, School of Mechanical Engineering, Zhejiang University, Hangzhou 310027, China.
Micromachines (Basel). 2020 Aug 12;11(8):770. doi: 10.3390/mi11080770.
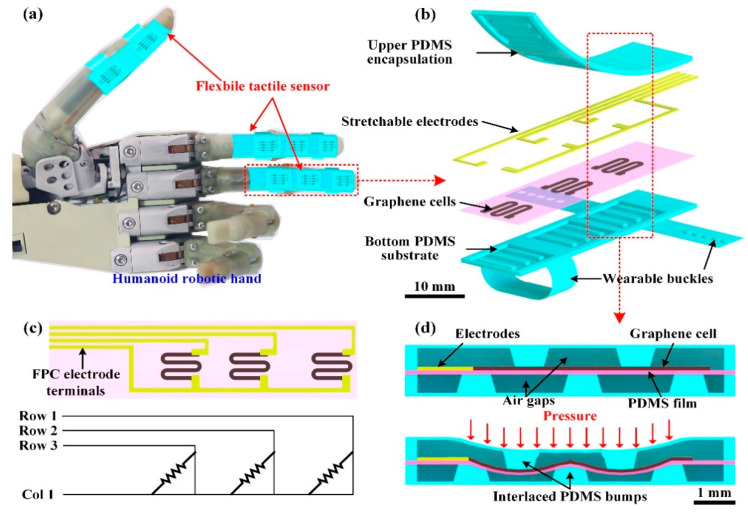
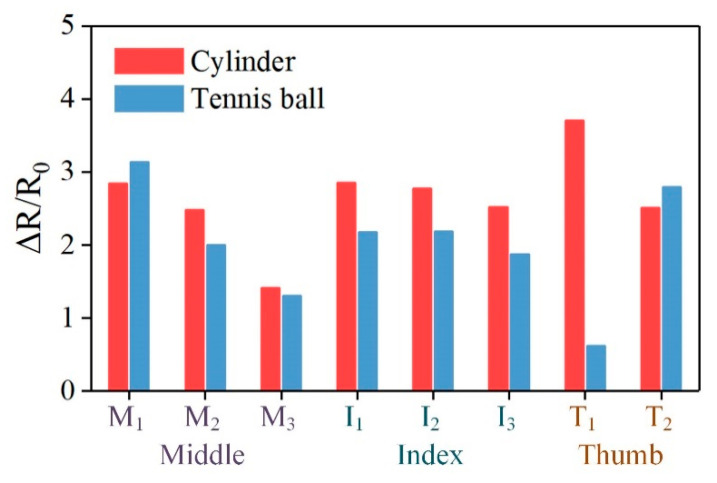
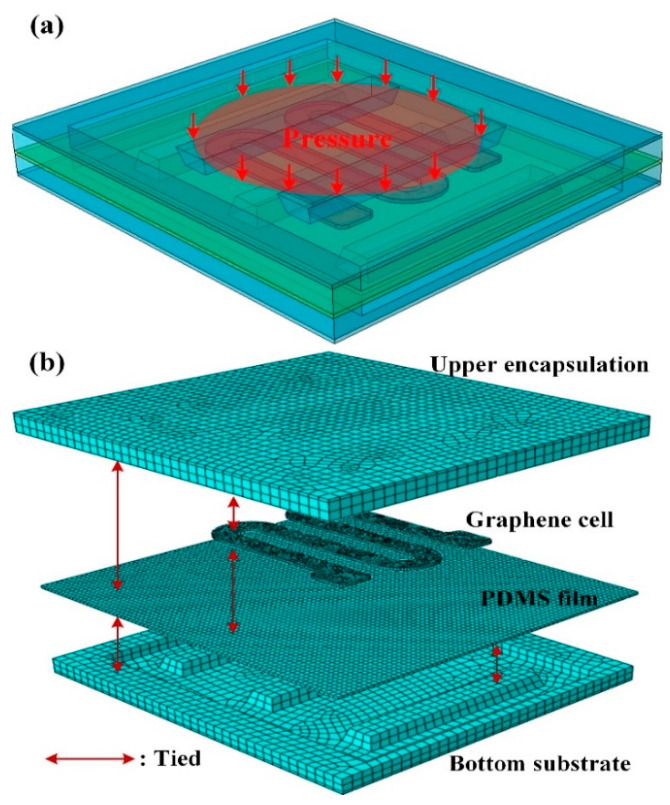
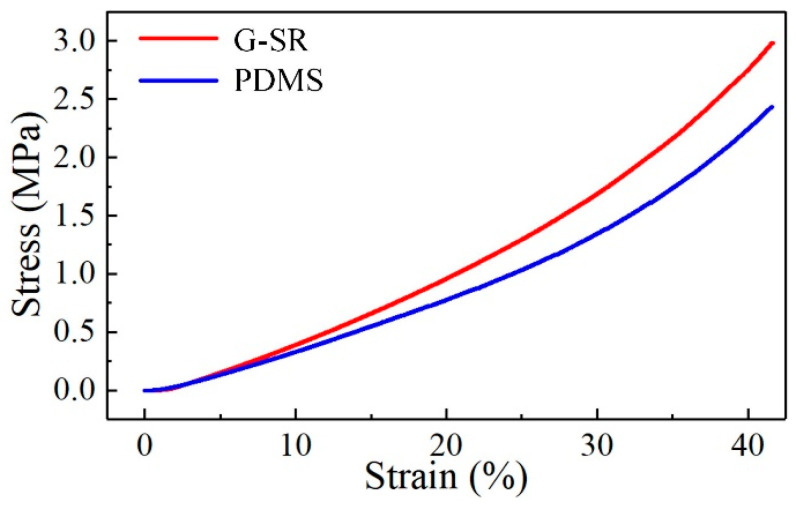
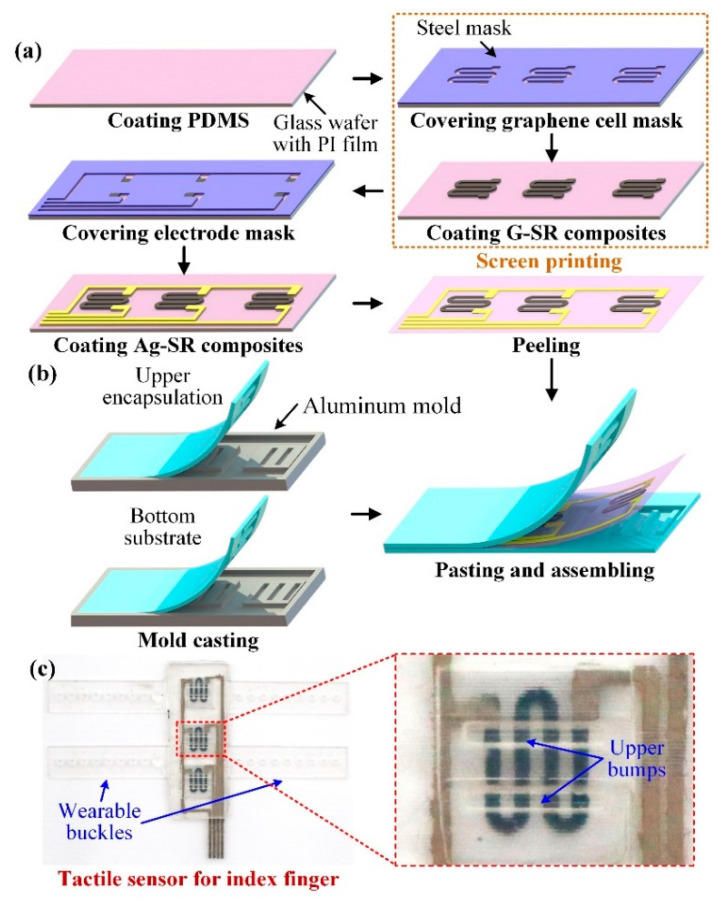
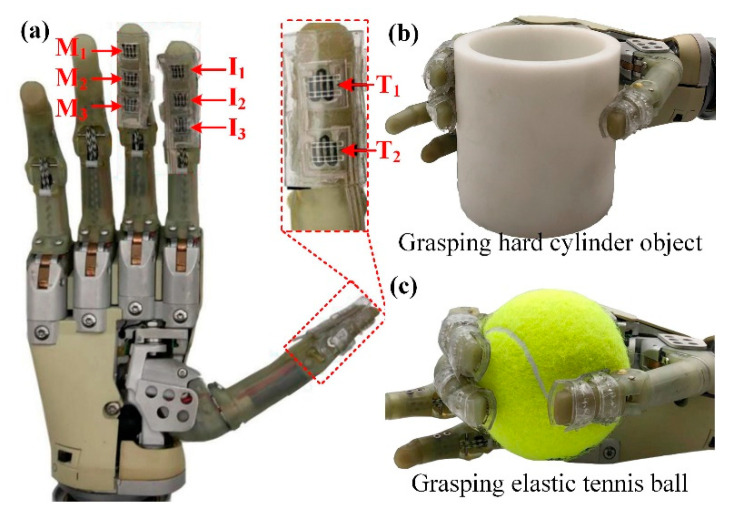
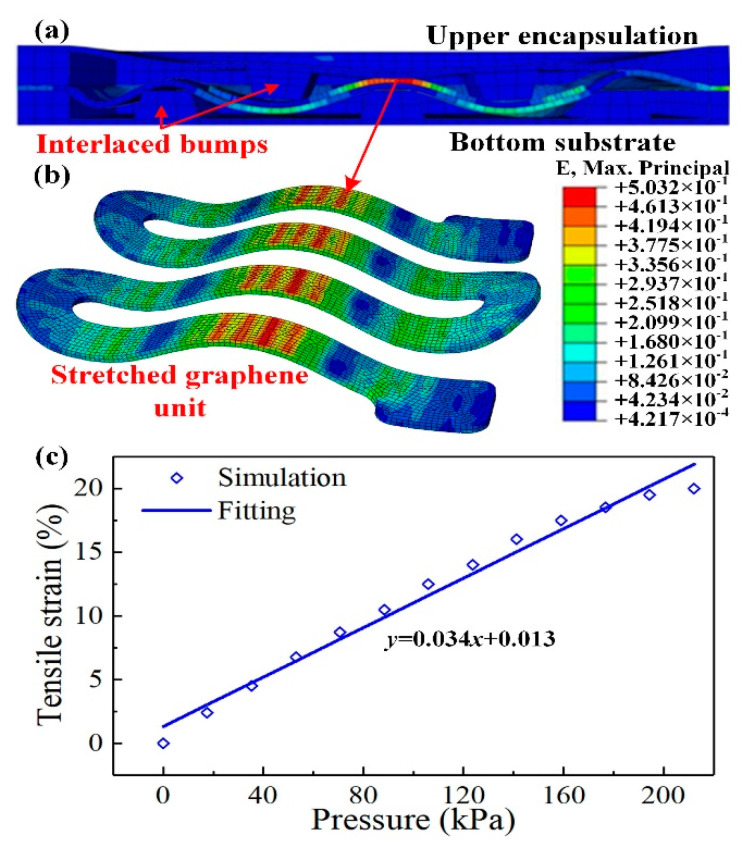
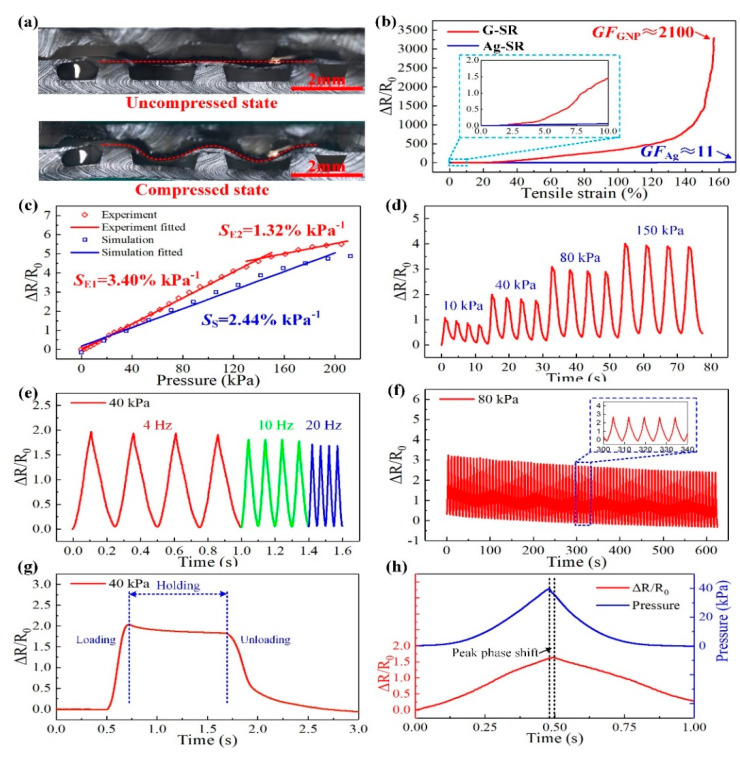
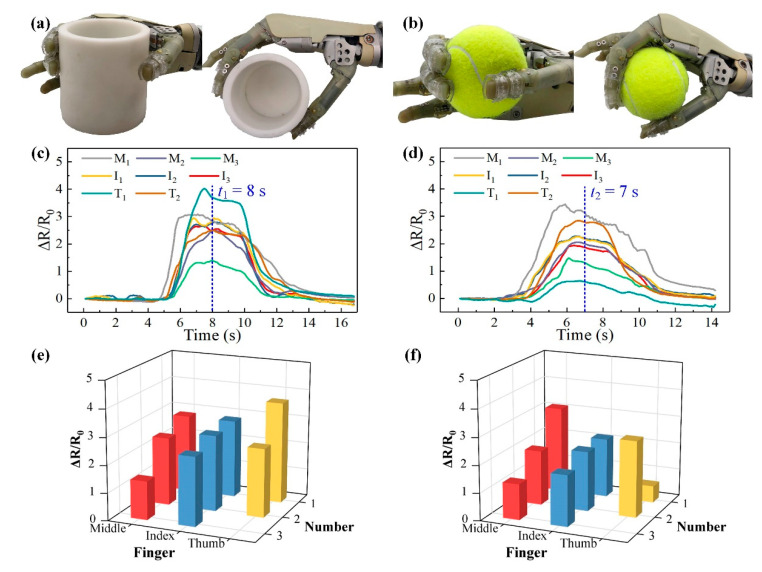
Flexible tactile sensors have been utilized in intelligent robotics for human-machine interaction and healthcare monitoring. The relatively low flexibility, unbalanced sensitivity and sensing range of the tactile sensors are hindering the accurate tactile information perception during robotic hand grasping of different objects. This paper developed a fully flexible tactile pressure sensor, using the flexible graphene and silver composites as the sensing element and stretchable electrodes, respectively. As for the structural design of the tactile sensor, the proposed bilayer interlaced bumps can be used to convert external pressure into the stretching of graphene composites. The fabricated tactile sensor exhibits a high sensing performance, including relatively high sensitivity (up to 3.40% kPa), wide sensing range (200 kPa), good dynamic response, and considerable repeatability. Then, the tactile sensor has been integrated with the robotic hand finger, and the grasping results have indicated the capability of using the tactile sensor to detect the distributed pressure during grasping applications. The grasping motions, properties of the objects can be further analyzed through the acquired tactile information in time and spatial domains, demonstrating the potential applications of the tactile sensor in intelligent robotics and human-machine interfaces.
柔性触觉传感器已被应用于智能机器人领域,用于人机交互和健康监测。触觉传感器相对较低的柔韧性、不平衡的灵敏度和传感范围,阻碍了机器人手抓取不同物体时准确的触觉信息感知。本文开发了一种全柔性触觉压力传感器,分别使用柔性石墨烯和银复合材料作为传感元件和可拉伸电极。至于触觉传感器的结构设计,所提出的双层交错凸起可用于将外部压力转化为石墨烯复合材料的拉伸。所制备的触觉传感器具有高传感性能,包括相对较高的灵敏度(高达3.40% kPa)、宽传感范围(200 kPa)、良好的动态响应和相当的重复性。然后,触觉传感器已与机器人手指集成,抓取结果表明该触觉传感器能够在抓取应用中检测分布压力。通过在时间和空间域中获取的触觉信息,可以进一步分析抓取动作和物体特性,证明了触觉传感器在智能机器人和人机界面中的潜在应用。