Graduate Program in Electrical and Computer Engineering (CPGEI), Federal University of Technology-Paraná (UTFPR), Curitiba-PR 80230-901, Brazil.
Sensors (Basel). 2020 Sep 26;20(19):5511. doi: 10.3390/s20195511.
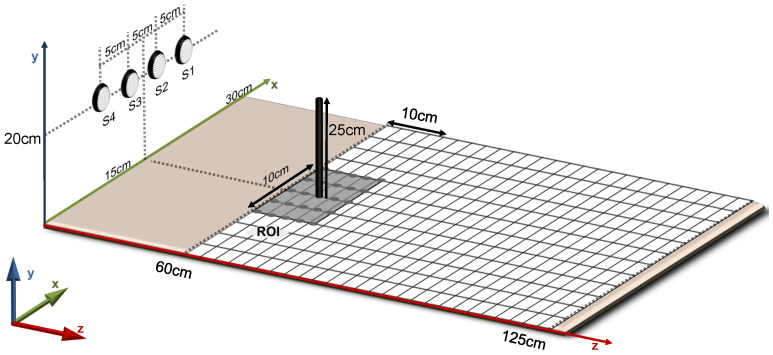
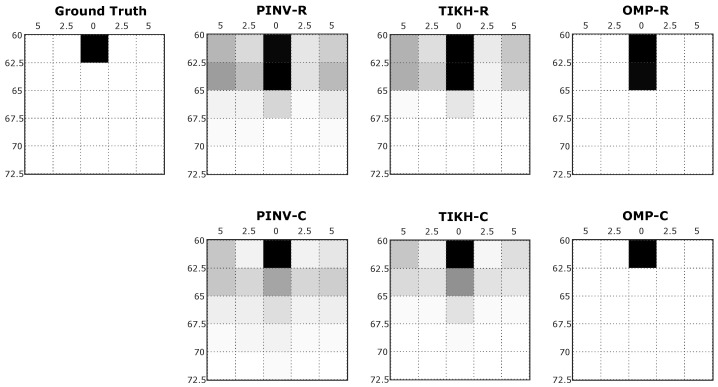
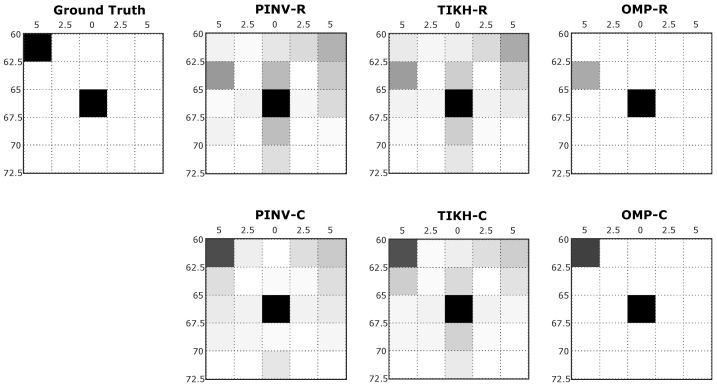
Methods for autonomous navigation systems using sonars in air traditionally use the time-of-flight technique for obstacle detection and environment mapping. However, this technique suffers from constructive and destructive interference of ultrasonic reflections from multiple obstacles in the environment, requiring several acquisitions for proper mapping. This paper presents a novel approach for obstacle detection and localisation using inverse problems and compressed sensing concepts. Experiments were conducted with multiple obstacles present in a controlled environment using a hardware platform with four transducers, which was specially designed for sending, receiving and acquiring raw ultrasonic signals. A comparison between the performance of compressed sensing using Orthogonal Matching Pursuit and two traditional image reconstruction methods was conducted. The reconstructed 2D images representing the cross-section of the sensed environment were quantitatively assessed, showing promising results for robotic mapping tasks using compressed sensing.
基于声纳的自主导航系统在传统上使用飞行时间技术进行障碍物检测和环境映射。然而,该技术受到环境中多个障碍物超声反射的建设性和破坏性干扰的影响,需要多次采集才能进行适当的映射。本文提出了一种使用反问题和压缩感知概念进行障碍物检测和定位的新方法。实验在具有四个换能器的硬件平台上进行,该平台专门用于发送、接收和获取原始超声信号,在受控环境中存在多个障碍物的情况下进行。对使用正交匹配追踪的压缩感知与两种传统的图像重建方法的性能进行了比较。对表示所感测环境的横截面的重建 2D 图像进行了定量评估,为使用压缩感知进行机器人映射任务提供了有希望的结果。