School of Electrical and Computer Engineering, University of Georgia, Athens, GA, USA.
Magnet Program, Montgomery Blair High School, Silver Spring, MD, USA.
Minim Invasive Ther Allied Technol. 2022 Mar;31(3):410-417. doi: 10.1080/13645706.2020.1832122. Epub 2020 Nov 18.
Minimally invasive image-guided interventions have changed the face of procedural medicine. For these procedures, safety and efficacy depend on precise needle placement. Needle targeting devices help improve the accuracy of needle placement, but their use has not seen broad penetration. Some of these devices are costly and require major modifications to the clinical workflow. In this article, we developed a low-cost, disposable, and easy-to-use angulation tracking device, which was based on a redesigned commercial passive needle holder.
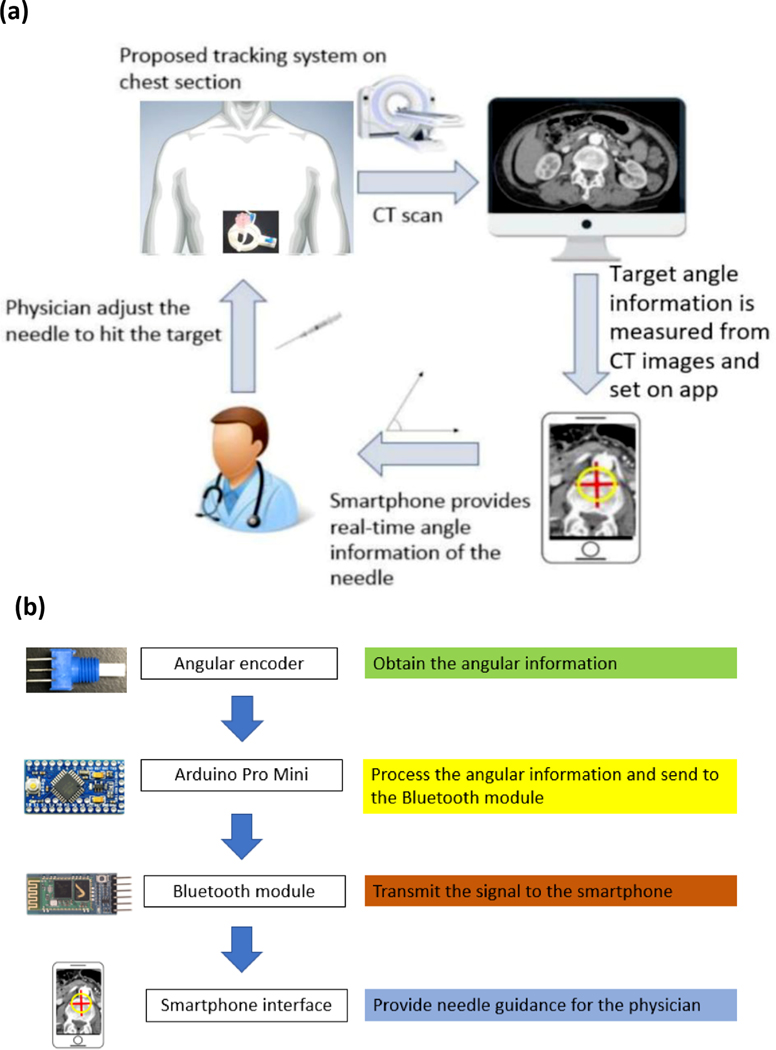
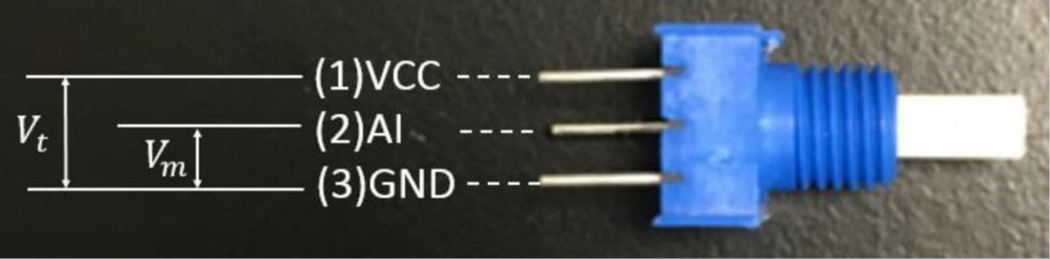
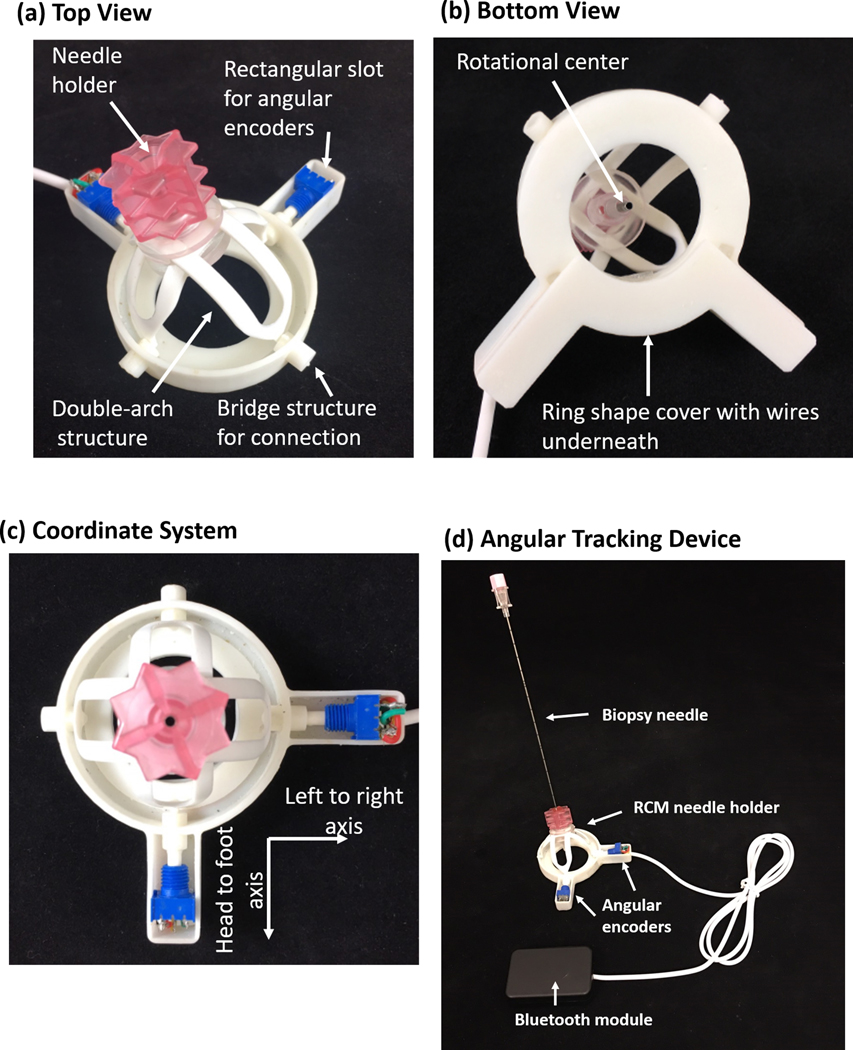
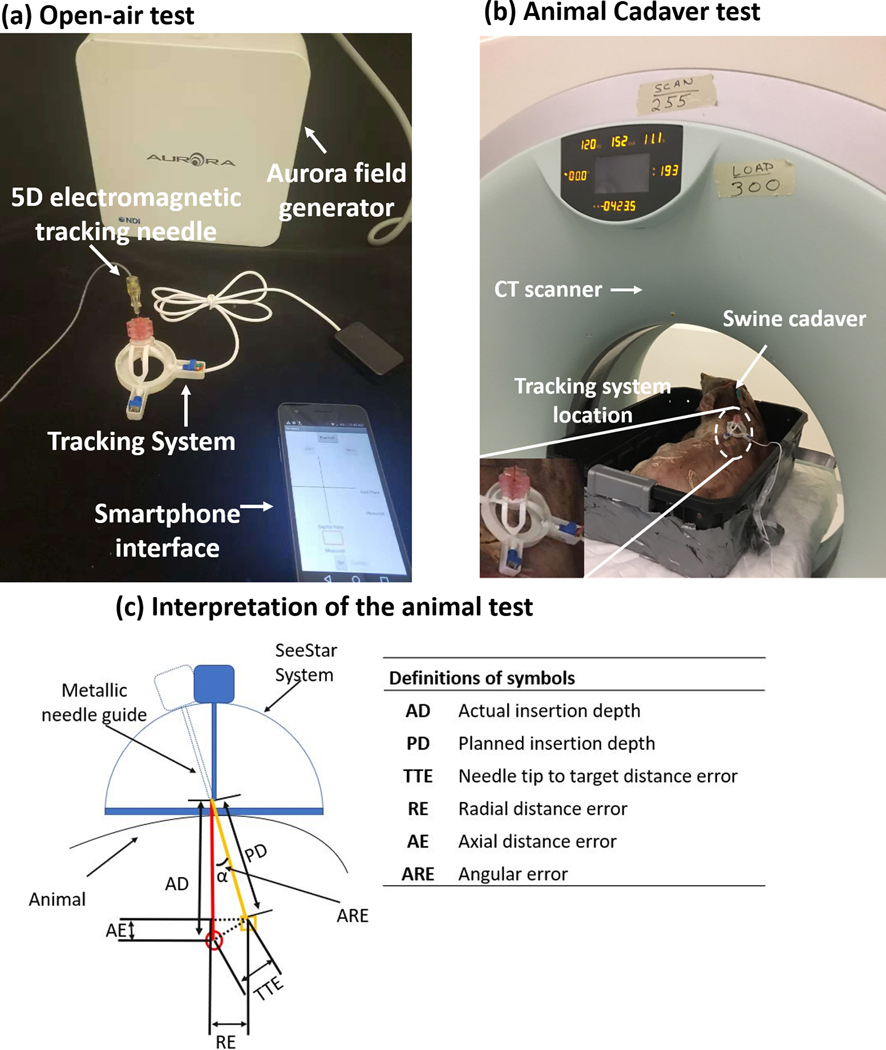
The new design provided real-time angulation information for needle tracking. In this design, two potentiometers were used as angulation sensors, and they were connected to two axes of the passive needle holder's arch structure through a 3 D-printed bridge structure. A control unit included an Arduino Pro Mini, a Bluetooth module, and two rechargeable batteries. The angulation was calculated and communicated in real time to a novel developed smartphone app, where real-time angulation information was displayed for guiding the operator to position the needle to the planned angles.
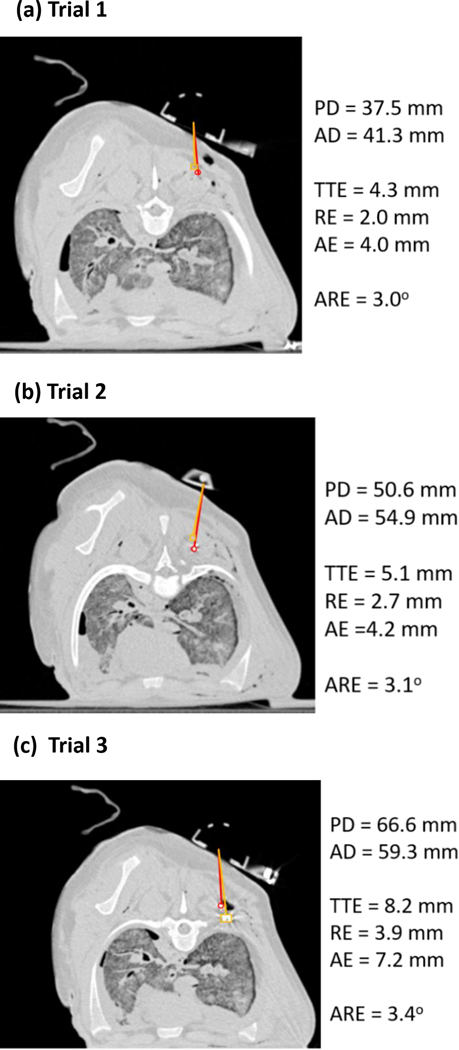
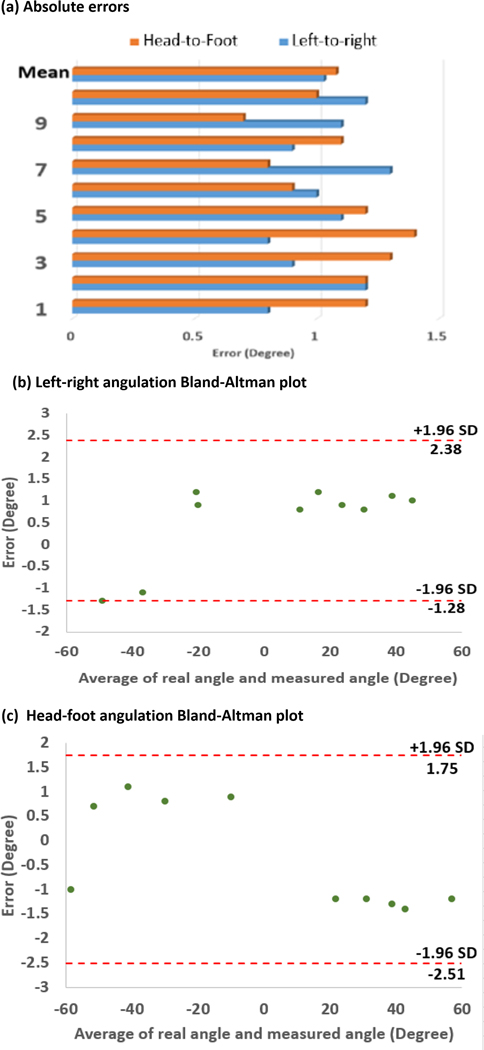
The open-air test results showed that the average errors are 1.03° and 1.08° for left-right angulation and head-foot angulation, respectively. The animal cadaver tests revealed that the novel system had an average angular error of 3.2° and a radial distance error of 3.1 mm.
The accuracy was comparable with some commercially available solutions. The novel and low-cost needle tracking device may find a role as part of a real-time precision approach to both planning and implementation of image-guided therapies.
微创影像引导介入已经改变了介入医学的面貌。对于这些手术,安全性和疗效取决于精确的针尖定位。针定位设备有助于提高针尖定位的准确性,但它们的使用尚未广泛普及。其中一些设备昂贵,需要对临床工作流程进行重大修改。在本文中,我们开发了一种低成本、一次性且易于使用的角度跟踪装置,该装置基于重新设计的商业被动持针器。
新设计为针跟踪提供实时角度信息。在该设计中,两个电位器用作角度传感器,并通过 3D 打印桥结构连接到被动持针器拱形结构的两个轴上。控制单元包括一个 Arduino Pro Mini、一个蓝牙模块和两个可充电电池。角度实时计算并实时传输到新开发的智能手机应用程序,该应用程序实时显示角度信息,以指导操作者将针定位到计划角度。
露天测试结果表明,左右角度和头脚角度的平均误差分别为 1.03°和 1.08°。动物尸体测试表明,该新型系统的平均角度误差为 3.2°,径向距离误差为 3.1mm。
该系统的准确性可与一些商业上可用的解决方案相媲美。新型低成本的针跟踪装置可能在实时精确规划和实施影像引导治疗中发挥作用。