Department of Electrical and Computer Engineering, University of California, Santa Cruz, Santa Cruz, California, United States of America.
Department of Nuclear, Plasma, and Radiological Engineering, University of Illinois at Urbana-Champaign, Urbana, Illinois, United States of America.
PLoS One. 2020 Dec 29;15(12):e0244378. doi: 10.1371/journal.pone.0244378. eCollection 2020.
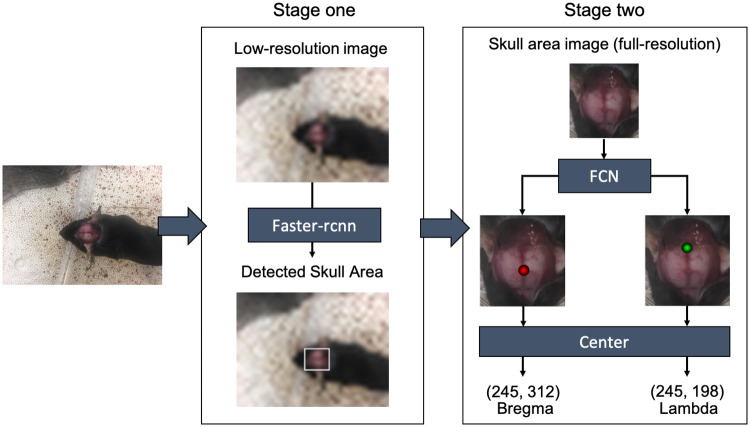
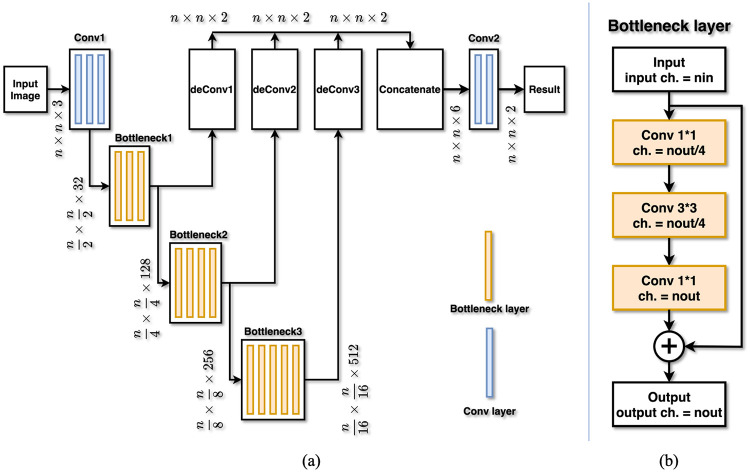
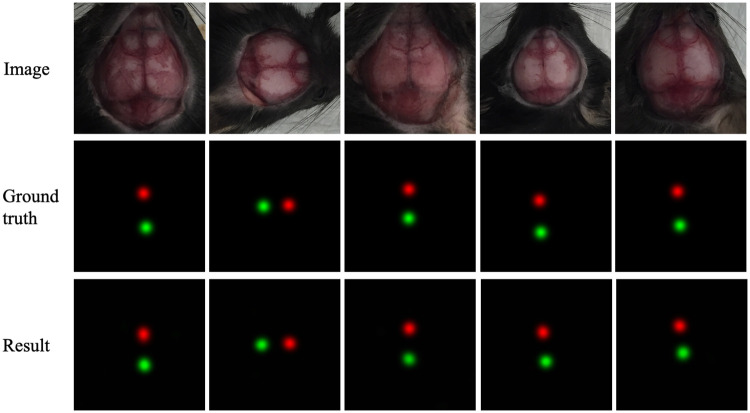
Currently, injection sites of probes, cannula, and optic fibers in stereotactic neurosurgery are typically located manually. This step involves location estimations based on human experiences and thus introduces errors. In order to reduce localization error and improve repeatability of experiments and treatments, we investigate an automated method to locate injection sites. This paper proposes a localization framework, which integrates a region-based convolutional network and a fully convolutional network, to locate specific anatomical points on skulls of rodents. Experiment results show that the proposed localization framework is capable of identifying and locatin bregma and lambda in rodent skull anatomy images with mean errors less than 300 μm. This method is robust to different lighting conditions and mouse orientations, and has the potential to simplify the procedure of locating injection sites.
目前,立体定向神经外科中探针、套管和光纤的注射部位通常是手动定位的。这一步骤涉及基于人类经验的位置估计,因此会引入误差。为了减少定位误差,提高实验和治疗的可重复性,我们研究了一种自动定位注射部位的方法。本文提出了一种定位框架,该框架结合了基于区域的卷积网络和全卷积网络,用于定位啮齿动物颅骨上的特定解剖点。实验结果表明,所提出的定位框架能够以小于 300μm 的平均误差识别和定位啮齿动物颅骨解剖图像中的额骨和棘突。该方法对不同的光照条件和老鼠方向具有鲁棒性,并且有可能简化注射部位的定位过程。