Institute of Robotics and Cybernetics, Faculty of Electrical Engineering and Information Technology STU in Bratislava, Ilkovičova 3, 812 19 Bratislava, Slovakia.
Sensors (Basel). 2021 Jan 8;21(2):413. doi: 10.3390/s21020413.
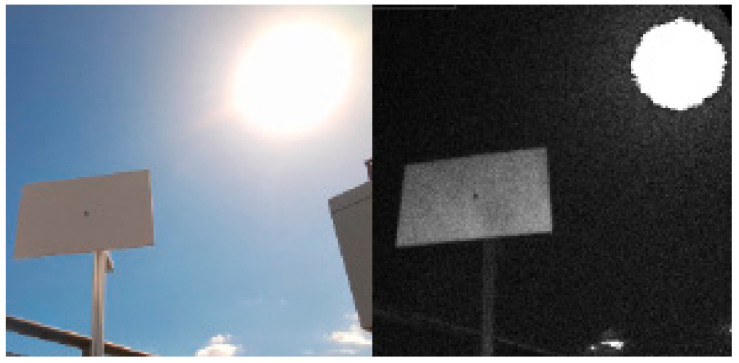
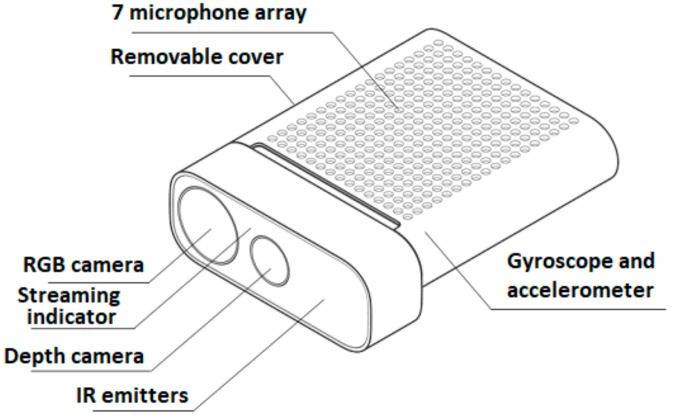
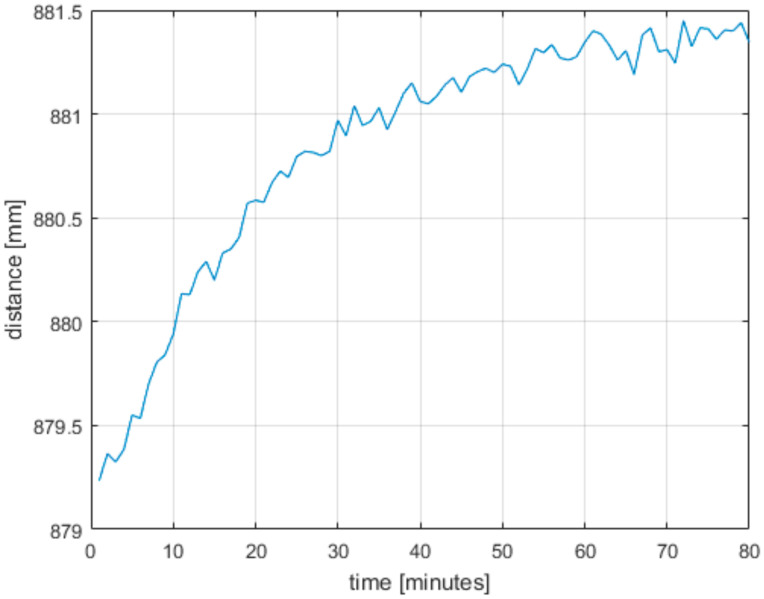
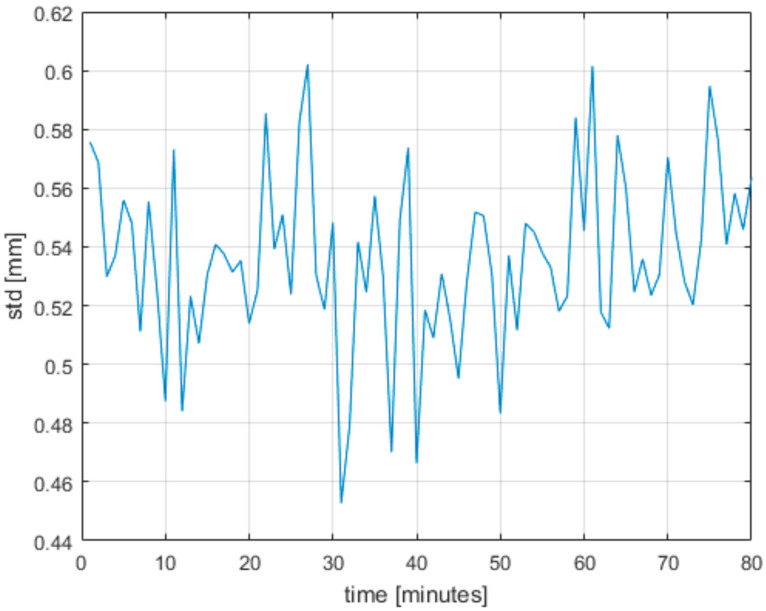
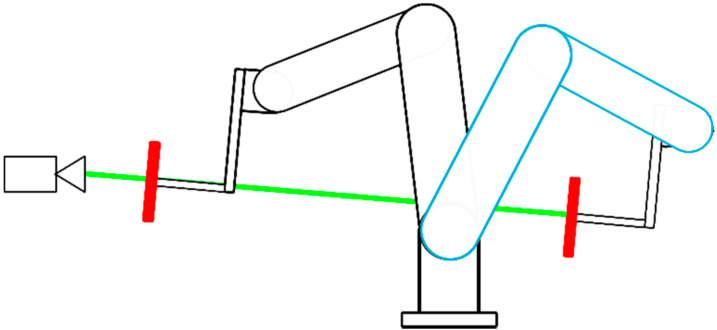
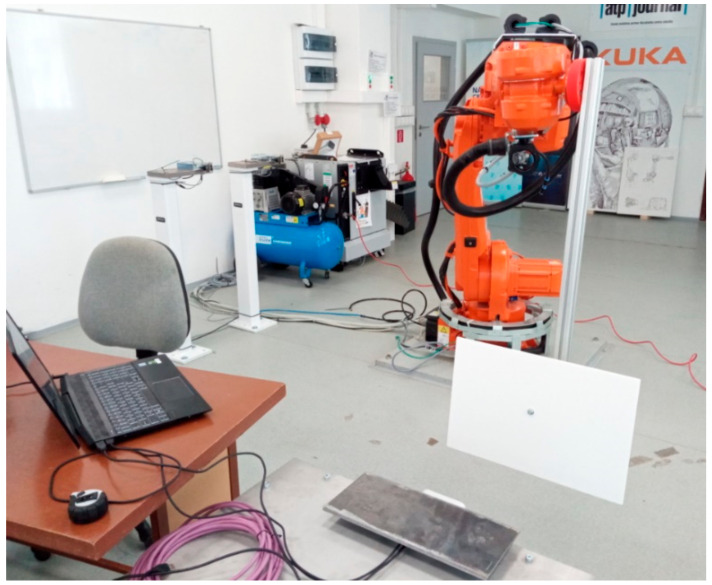
The Azure Kinect is the successor of Kinect v1 and Kinect v2. In this paper we perform brief data analysis and comparison of all Kinect versions with focus on precision (repeatability) and various aspects of noise of these three sensors. Then we thoroughly evaluate the new Azure Kinect; namely its warm-up time, precision (and sources of its variability), accuracy (thoroughly, using a robotic arm), reflectivity (using 18 different materials), and the multipath and flying pixel phenomenon. Furthermore, we validate its performance in both indoor and outdoor environments, including direct and indirect sun conditions. We conclude with a discussion on its improvements in the context of the evolution of the Kinect sensor. It was shown that it is crucial to choose well designed experiments to measure accuracy, since the RGB and depth camera are not aligned. Our measurements confirm the officially stated values, namely standard deviation ≤17 mm, and distance error <11 mm in up to 3.5 meters distance from the sensor in all four supported modes. The device, however, has to be warmed up for at least 40-50 min to give stable results. Due to the time-of-flight technology, the Azure Kinect cannot be reliably used in direct sunlight. Therefore, it is convenient mostly for indoor applications.
Azure Kinect 是 Kinect v1 和 Kinect v2 的后继产品。在本文中,我们对所有 Kinect 版本进行了简要的数据分析和比较,重点关注这些三个传感器的精度(可重复性)和各种噪声方面。然后,我们彻底评估了新的 Azure Kinect;即其预热时间、精度(及其可变性的来源)、准确性(使用机械臂进行彻底评估)、反射率(使用 18 种不同的材料)以及多径和飞像素现象。此外,我们还在室内和室外环境中验证了其性能,包括直接和间接阳光条件。最后,我们讨论了它在 Kinect 传感器的发展背景下的改进。事实证明,选择精心设计的实验来测量精度非常重要,因为 RGB 和深度相机未对齐。我们的测量结果证实了官方声明的值,即在所有四个支持的模式下,标准偏差≤17mm,距离误差<11mm,距离传感器最远可达 3.5 米。然而,该设备必须预热至少 40-50 分钟才能给出稳定的结果。由于飞行时间技术,Azure Kinect 不能在直射阳光下可靠使用。因此,它主要适用于室内应用。