Schneider Julian, Brünett Matthias, Gebert Anne, Gisa Kevin, Hermann Andreas, Lengenfelder Christian, Roennau Arne, Schuh Svea, Steffen Lea
Institute of Control Systems (IRS), Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany.
German Institute of Applied Nursing Research (DIP), Cologne, Germany.
Front Robot AI. 2024 Oct 9;11:1325143. doi: 10.3389/frobt.2024.1325143. eCollection 2024.
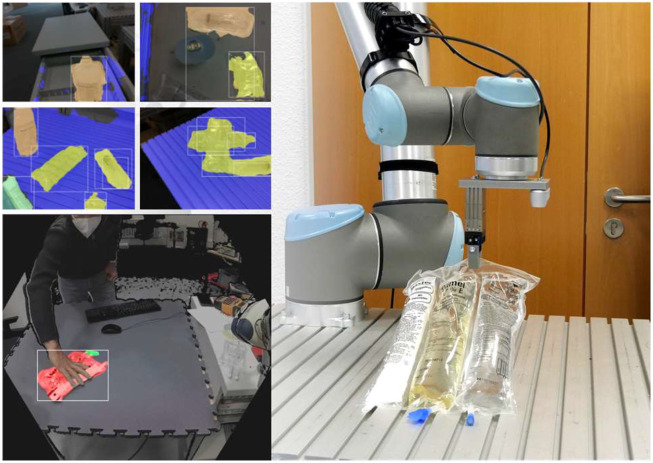
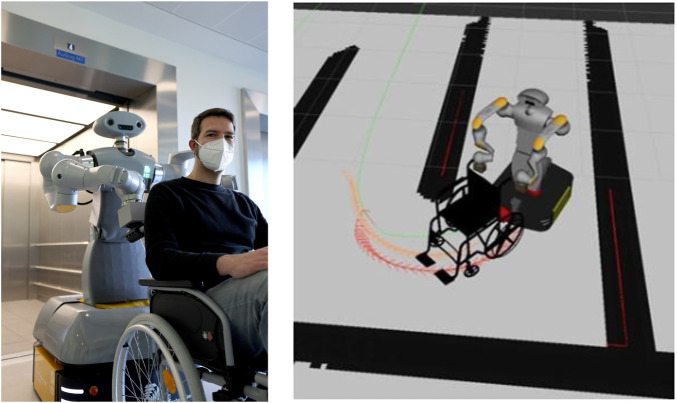
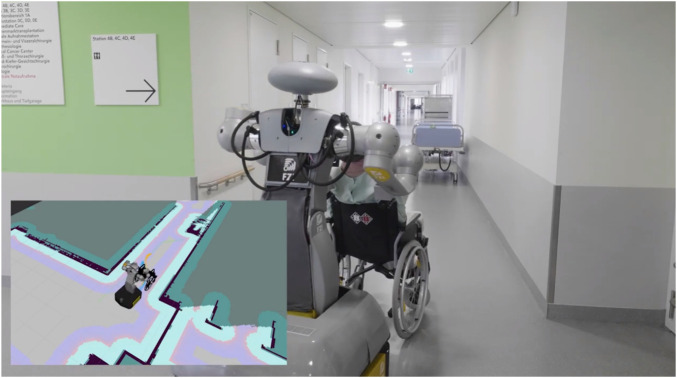
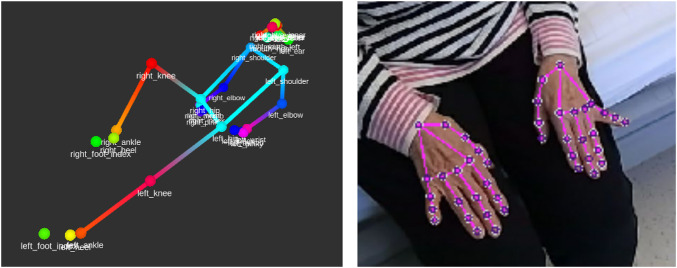
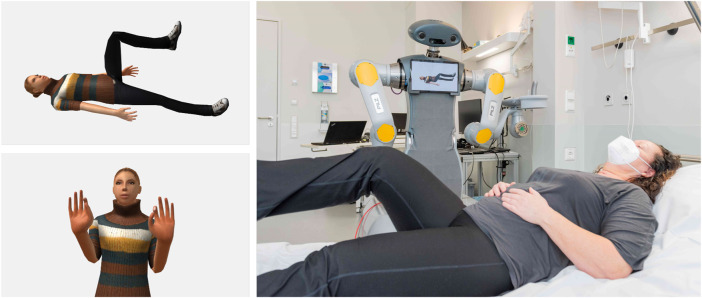
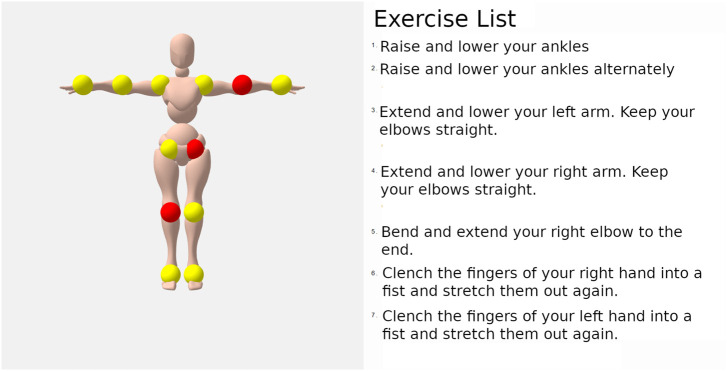
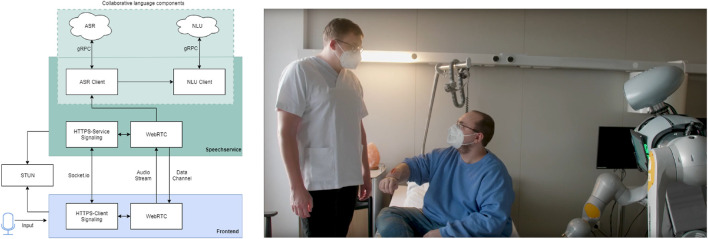
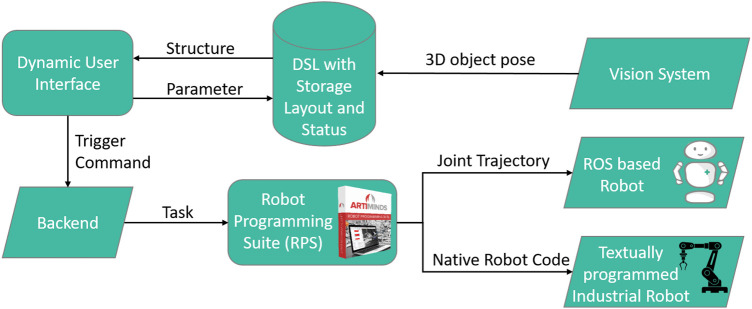
Germany's healthcare sector suffers from a shortage of nursing staff, and robotic solutions are being explored as a means to provide quality care. While many robotic systems have already been established in various medical fields (e.g., surgical robots, logistics robots), there are only a few very specialized robotic applications in the care sector. In this work, a multi-functional robot is applied in a hospital, capable of performing activities in the areas of transport and logistics, interactive assistance, and documentation. The service robot platform HoLLiE was further developed, with a focus on implementing innovative solutions for handling non-rigid objects, motion planning for non-holonomic motions with a wheelchair, accompanying and providing haptic support to patients, optical recognition and control of movement exercises, and automated speech recognition. Furthermore, the potential of a robot platform in a nursing context was evaluated by field tests in two hospitals. The results show that a robot can take over or support certain tasks. However, it was noted that robotic tasks should be carefully selected, as robots are not able to provide empathy and affection that are often required in nursing. The remaining challenges still exist in the implementation and interaction of multi-functional capabilities, ensuring ease of use for a complex robotic system, grasping highly heterogeneous objects, and fulfilling formal and infrastructural requirements in healthcare (e.g., safety, security, and data protection).
德国医疗保健部门面临护理人员短缺的问题,目前正在探索机器人解决方案,作为提供优质护理的一种手段。虽然许多机器人系统已经在各个医疗领域建立起来(例如手术机器人、物流机器人),但护理领域只有少数非常专业化的机器人应用。在这项工作中,一种多功能机器人被应用于一家医院,能够在运输与物流、交互辅助和文档记录等领域开展活动。服务机器人平台HoLLiE得到了进一步开发,重点是实施处理非刚性物体的创新解决方案、使用轮椅进行非完整运动的运动规划、陪伴患者并提供触觉支持、光学识别和控制运动锻炼以及自动语音识别。此外,通过在两家医院进行的现场测试,评估了机器人平台在护理环境中的潜力。结果表明,机器人可以接管或支持某些任务。然而,需要注意的是,机器人任务应谨慎选择,因为机器人无法提供护理中经常需要的同理心和情感。在多功能能力的实现和交互、确保复杂机器人系统的易用性、抓取高度异质的物体以及满足医疗保健中的形式和基础设施要求(例如安全、安保和数据保护)方面,仍然存在挑战。