Hotchkiss Brain Institute, University of Calgary, Calgary, AB, Canada.
Department of Clinical Neurosciences, University of Calgary, Calgary, AB, Canada.
J Neuroeng Rehabil. 2021 Jan 21;18(1):10. doi: 10.1186/s12984-021-00804-8.
Robotic rehabilitation after stroke provides the potential to increase and carefully control dosage of therapy. Only a small number of studies, however, have examined robotic therapy in the first few weeks post-stroke. In this study we designed robotic upper extremity therapy tasks for the bilateral Kinarm Exoskeleton Lab and piloted them in individuals with subacute stroke. Pilot testing was focused mainly on the feasibility of implementing these new tasks, although we recorded a number of standardized outcome measures before and after training.
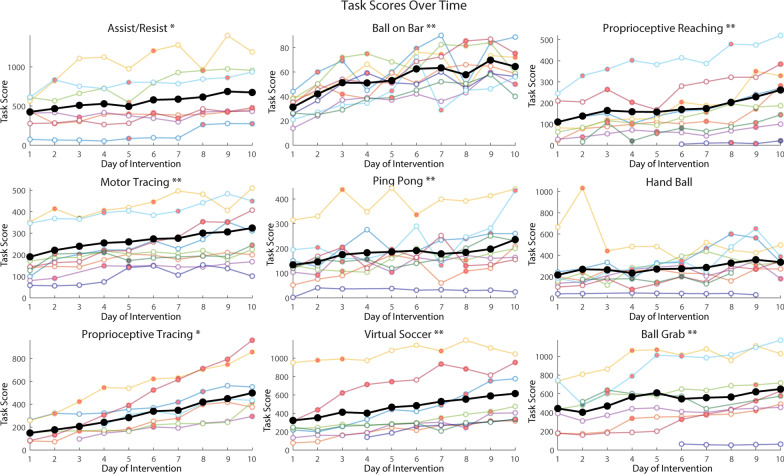
Our team developed 9 robotic therapy tasks to incorporate feedback, intensity, challenge, and subject engagement as well as addressing both unimanual and bimanual arm activities. Subacute stroke participants were assigned to a robotic therapy (N = 9) or control group (N = 10) in a matched-group manner. The robotic therapy group completed 1-h of robotic therapy per day for 10 days in addition to standard therapy. The control group participated only in standard of care therapy. Clinical and robotic assessments were completed prior to and following the intervention. Clinical assessments included the Fugl-Meyer Assessment of Upper Extremity (FMA UE), Action Research Arm Test (ARAT) and Functional Independence Measure (FIM). Robotic assessments of upper limb sensorimotor function included a Visually Guided Reaching task and an Arm Position Matching task, among others. Paired sample t-tests were used to compare initial and final robotic therapy scores as well as pre- and post-clinical and robotic assessments.
Participants with subacute stroke (39.8 days post-stroke) completed the pilot study. Minimal adverse events occurred during the intervention and adding 1 h of robotic therapy was feasible. Clinical and robotic scores did not significantly differ between groups at baseline. Scores on the FMA UE, ARAT, FIM, and Visually Guided Reaching improved significantly in the robotic therapy group following completion of the robotic intervention. However, only FIM and Arm Position Match improved over the same time in the control group.
The Kinarm therapy tasks have the potential to improve outcomes in subacute stroke. Future studies are necessary to quantify the benefits of this robot-based therapy in a larger cohort.
ClinicalTrials.gov, NCT04201613, Registered 17 December 2019-Retrospectively Registered, https://clinicaltrials.gov/ct2/show/NCT04201613 .
脑卒中后的机器人康复有增加和谨慎控制治疗剂量的潜力。然而,只有少数研究检查了脑卒中后最初几周的机器人治疗。在这项研究中,我们为双边 Kinarm Exoskeleton Lab 设计了机器人上肢治疗任务,并在亚急性脑卒中患者中进行了试点。试点测试主要集中在实施这些新任务的可行性上,尽管我们在训练前后记录了一些标准化的结果测量。
我们的团队开发了 9 个机器人治疗任务,以纳入反馈、强度、挑战和受试者参与度,同时解决单手和双手手臂活动。亚急性脑卒中参与者以匹配组的方式被分配到机器人治疗组(N=9)或对照组(N=10)。机器人治疗组除了标准治疗外,每天还完成 1 小时的机器人治疗。对照组仅参加标准护理治疗。在干预前后完成临床和机器人评估。临床评估包括上肢 Fugl-Meyer 评估(FMA UE)、动作研究上肢测试(ARAT)和功能独立性测量(FIM)。上肢感觉运动功能的机器人评估包括视觉导向的上肢任务和手臂位置匹配任务等。使用配对样本 t 检验比较初始和最终机器人治疗评分以及临床和机器人评估的前后情况。
亚急性脑卒中患者(脑卒中后 39.8 天)完成了试点研究。干预期间仅发生轻微不良事件,增加 1 小时的机器人治疗是可行的。在基线时,两组之间的临床和机器人评分没有显著差异。在完成机器人干预后,机器人治疗组的 FMA UE、ARAT、FIM 和视觉导向的上肢任务评分显著提高。然而,只有对照组的 FIM 和手臂位置匹配在同一时间内有所改善。
Kinarm 治疗任务有可能改善亚急性脑卒中患者的结局。未来的研究有必要在更大的队列中量化这种基于机器人的治疗的益处。
ClinicalTrials.gov,NCT04201613,2019 年 12 月 17 日注册-回顾性注册,https://clinicaltrials.gov/ct2/show/NCT04201613。