Brancadoro Margherita, Manti Mariangela, Grani Fabrizio, Tognarelli Selene, Menciassi Arianna, Cianchetti Matteo
The BioRobotics Institute, Scuola Superiore Sant'Anna, Pisa, Italy.
Front Robot AI. 2019 Mar 19;6:12. doi: 10.3389/frobt.2019.00012. eCollection 2019.
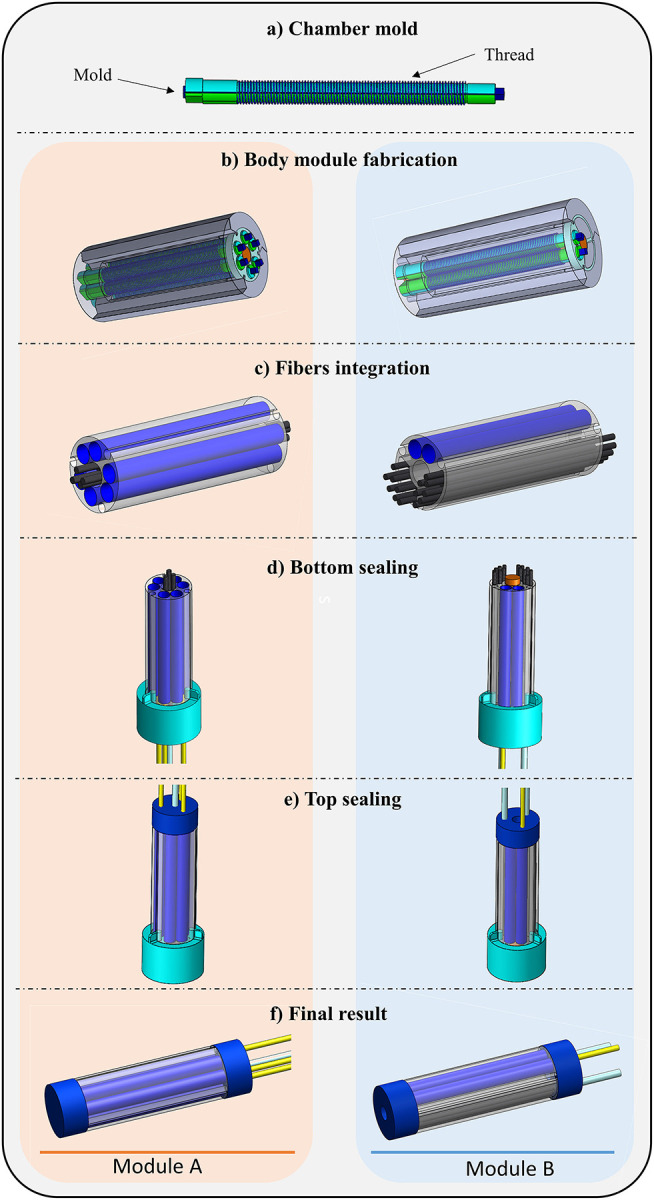
Soft robots have proved to represent a new frontier for the development of intelligent machines able to show new capabilities that can complement those currently performed by robots based on rigid materials. One of the main application areas where this shift is promising an impact is minimally invasive surgery. In previous works, the STFF-FLOP soft manipulator has been introduced as a new concept of using soft materials to develop endoscopic tools. In this paper, we present a novel kind of stiffening system based on fiber jamming transition that can be embedded in the manipulator to widen its applicability by increasing its stability and with the possibility to produce and transmit higher forces. The STIFF-FLOP original module has been re-designed in two new versions to incorporate the variable stiffness mechanism. The two designs have been evaluated in terms of dexterity and variable stiffness capability and, despite a general optimization rule did not clearly emerge, the study confirmed that fiber jamming transition can be considered an effective technological approach for obtaining variable stiffness in slender soft structures.
软机器人已被证明代表了智能机器发展的一个新前沿,这类智能机器能够展现出一些新能力,以补充目前由基于刚性材料的机器人所具备的能力。这种转变有望产生影响的主要应用领域之一是微创手术。在之前的工作中,STFF-FLOP软机械手作为一种利用软材料开发内窥镜工具的新概念被引入。在本文中,我们提出了一种基于纤维堵塞转变的新型硬化系统,该系统可嵌入机械手,通过提高其稳定性以及产生和传递更大力量的可能性来拓宽其适用性。STIFF-FLOP原始模块已被重新设计成两个新版本,以纳入可变刚度机制。对这两种设计在灵活性和可变刚度能力方面进行了评估,尽管没有明确出现通用的优化规则,但该研究证实,纤维堵塞转变可被视为在细长软结构中获得可变刚度的一种有效技术方法。