Yang Bilige, Baines Robert, Shah Dylan, Patiballa Sreekalyan, Thomas Eugene, Venkadesan Madhusudhan, Kramer-Bottiglio Rebecca
School of Engineering & Applied Science, Yale University, 10 Hillhouse Avenue, New Haven, CT 06520, USA.
Sci Adv. 2021 Oct;7(40):eabh2073. doi: 10.1126/sciadv.abh2073. Epub 2021 Oct 1.
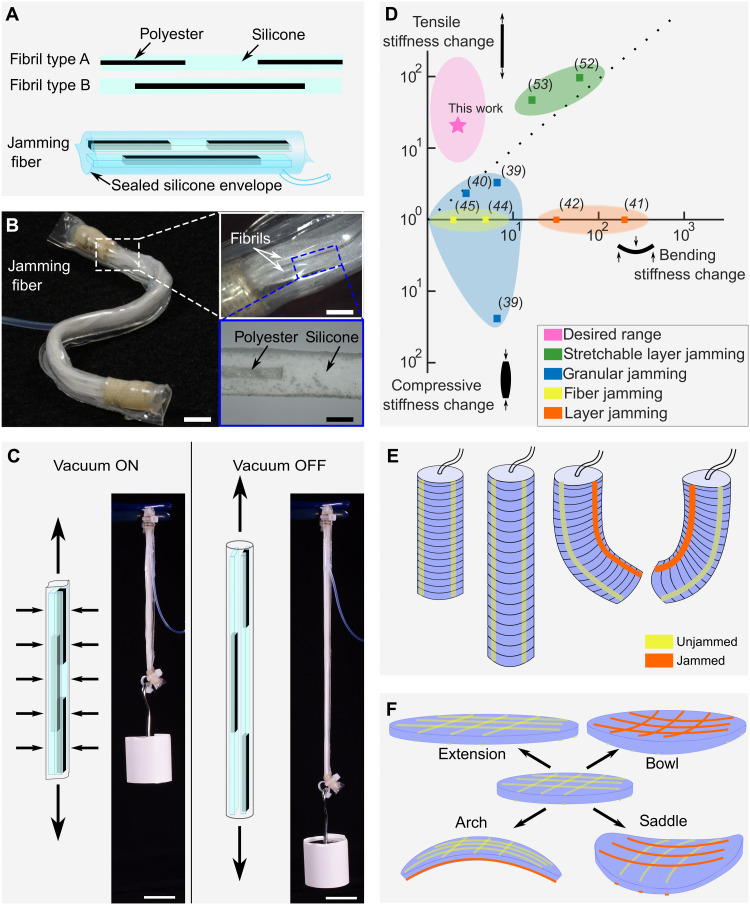
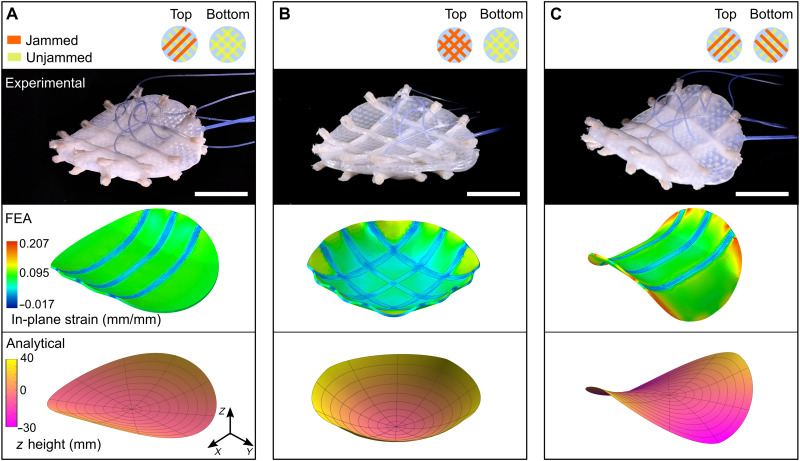
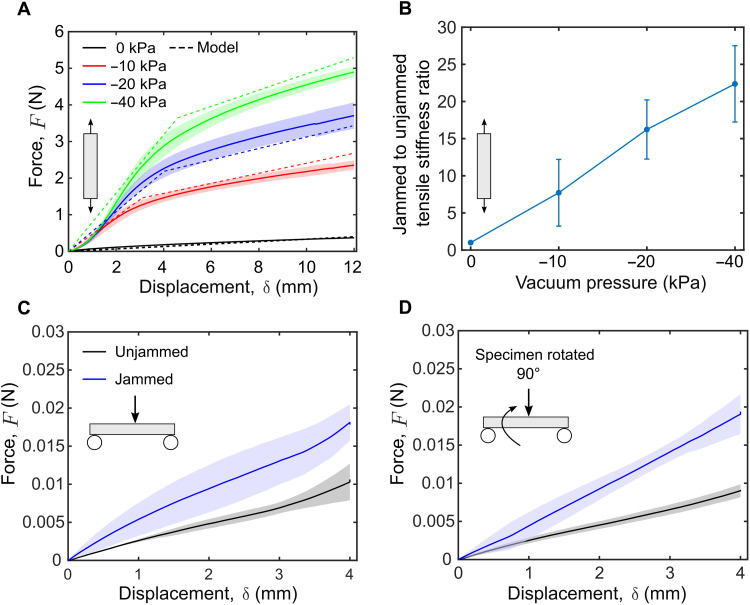
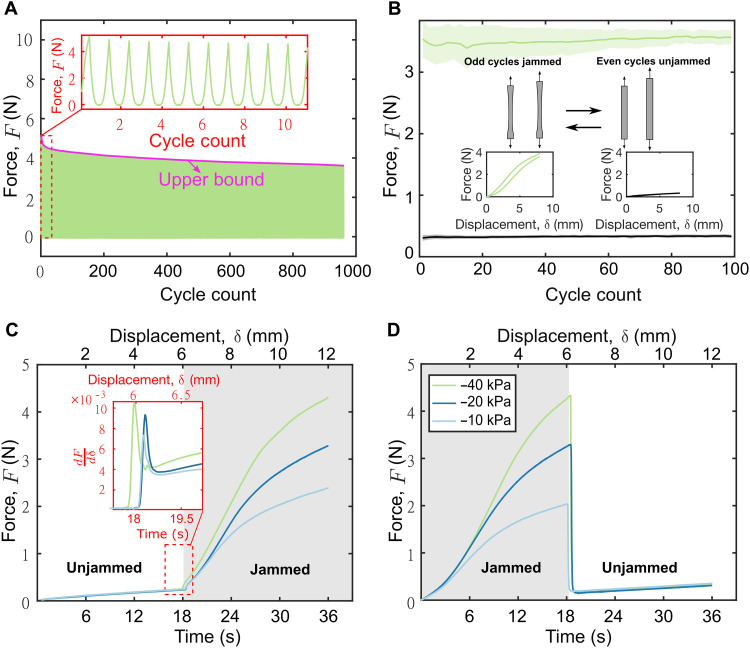
The emerging generation of robots composed of soft materials strives to match biological motor adaptation skills via shape-shifting. Soft robots often harness volumetric expansion directed by strain limiters to deform in complex ways. Traditionally, strain limiters have been inert materials embedded within a system to prescribe a single deformation. Under changing task demands, a fixed deformation mode limits adaptability. Recent technologies for on-demand reprogrammable deformation of soft bodies, including thermally activated variable stiffness materials and jamming systems, presently suffer from long actuation times or introduce unwanted bending stiffness. We present fibers that switch tensile stiffness via jamming of segmented elastic fibrils. When jammed, tensile stiffness increases more than 20× in less than 0.1 s, but bending stiffness increases only 2×. When adhered to an inflating body, jamming fibers locally limit surface tensile strains, unlocking myriad programmable deformations. The proposed jamming technology is scalable, enabling adaptive behaviors in emerging robotic materials that interact with unstructured environments.
由软材料构成的新一代机器人致力于通过变形来匹配生物运动适应技能。软机器人通常利用由应变限制器引导的体积膨胀以复杂方式变形。传统上,应变限制器是嵌入系统中的惰性材料,用于规定单一变形。在不断变化的任务需求下,固定的变形模式会限制适应性。目前,用于软物体按需重新编程变形的最新技术,包括热激活可变刚度材料和阻塞系统,存在驱动时间长或引入不必要的弯曲刚度的问题。我们展示了通过分段弹性原纤维的阻塞来切换拉伸刚度的纤维。当被阻塞时,拉伸刚度在不到0.1秒内增加超过20倍,但弯曲刚度仅增加2倍。当附着在充气物体上时,阻塞纤维会局部限制表面拉伸应变,从而解锁无数可编程变形。所提出的阻塞技术具有可扩展性,能够在与非结构化环境相互作用的新兴机器人材料中实现自适应行为。