Gong Zheyuan, Chen Bohan, Liu Jiaqi, Fang Xi, Liu Zemin, Wang Tianmiao, Wen Li
School of Mechanical Engineering and Automation, Beihang University, Beijing, China.
Beijing Advanced Innovation Center for Biomedical Engineering, Beihang University, Beijing, China.
Front Robot AI. 2019 Apr 24;6:26. doi: 10.3389/frobt.2019.00026. eCollection 2019.
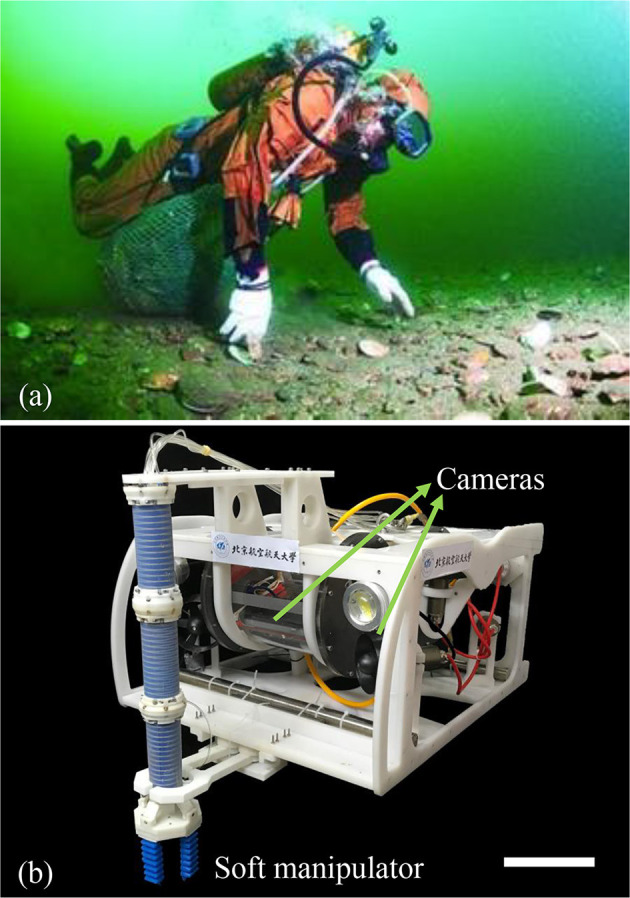
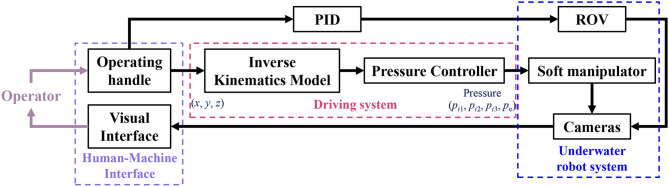
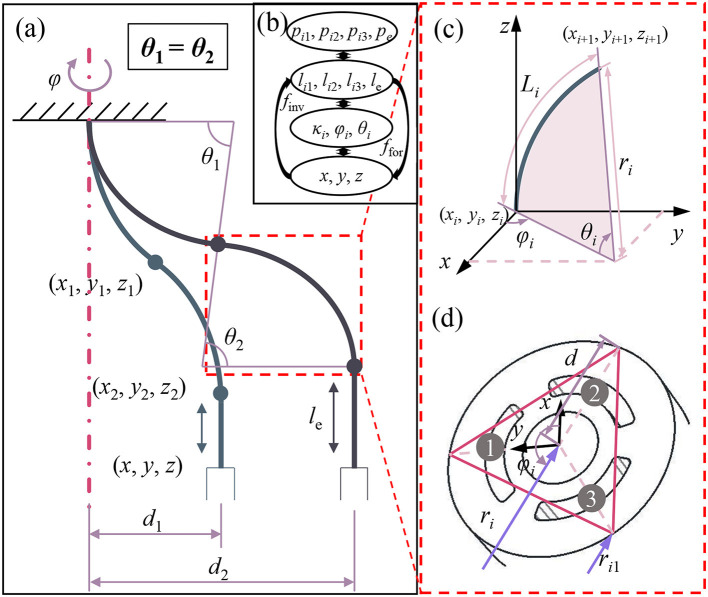
Collecting seafood animals (such as sea cucumbers, sea echini, scallops, etc.) cultivated in shallow water (water depth: ~30 m) is a profitable and an emerging field that requires robotics for replacing human divers. Soft robotics have several promising features (e.g., safe contact with the objects, lightweight, etc.) for performing such a task. In this paper, we implement a soft manipulator with an opposite-bending-and-extension structure. A simple and rapid inverse kinematics method is proposed to control the spatial location and trajectory of the underwater soft manipulator's end effector. We introduce the actuation hardware of the prototype, and then characterize the trajectory and workspace. We find that the prototype can well track fundamental trajectories such as a line and an arc. Finally, we construct a small underwater robot and demonstrate that the underwater soft manipulator successfully collects multiple irregular shaped seafood animals of different sizes and stiffness at the bottom of the natural oceanic environment (water depth: ~10 m).
收集在浅水区(水深约30米)养殖的海鲜动物(如海参、海胆、扇贝等)是一个有利可图的新兴领域,需要机器人来取代潜水员。软体机器人具有几个有前景的特性(例如,与物体安全接触、重量轻等)来执行这样的任务。在本文中,我们实现了一种具有反向弯曲和伸展结构的软体操纵器。提出了一种简单快速的逆运动学方法来控制水下软体操纵器末端执行器的空间位置和轨迹。我们介绍了原型的驱动硬件,然后对轨迹和工作空间进行了表征。我们发现该原型能够很好地跟踪直线和弧线等基本轨迹。最后,我们构建了一个小型水下机器人,并证明水下软体操纵器在自然海洋环境底部(水深约10米)成功收集了多个不同大小和刚度的不规则形状的海鲜动物。