Cetin Kamil, Tugal Harun, Petillot Yvan, Dunnigan Matthew, Newbrook Leonard, Erden Mustafa Suphi
Institute of Sensors, Signals and Systems, School of Engineering and Physical Sciences, Heriot-Watt University, Edinburgh EH14 4AL, UK.
Edinburgh Centre for Robotics, Edinburgh EH14 4AL, UK.
Sensors (Basel). 2022 Aug 4;22(15):5827. doi: 10.3390/s22155827.
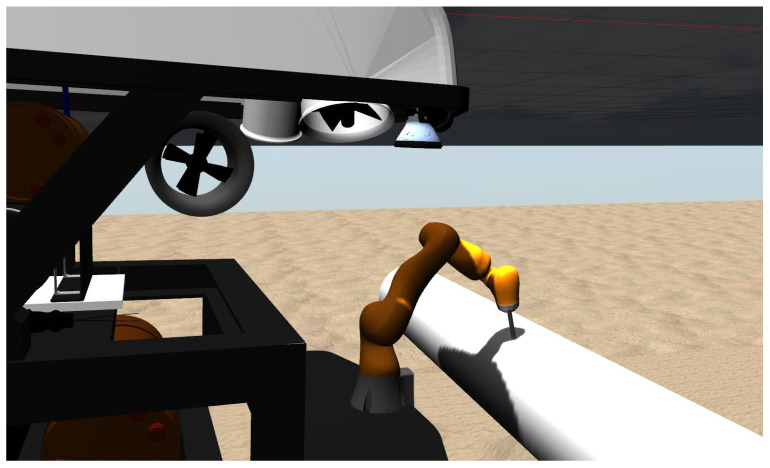
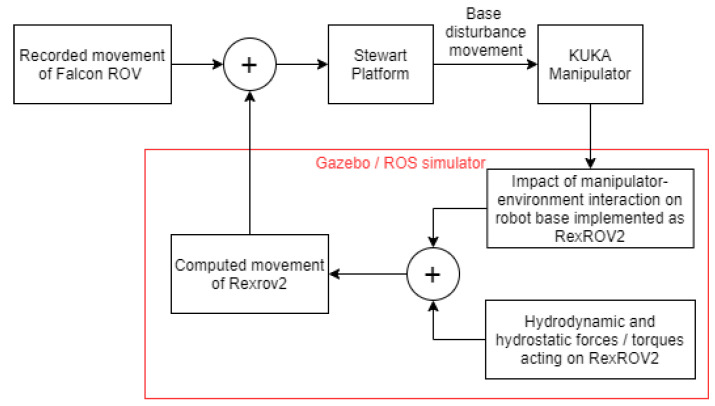
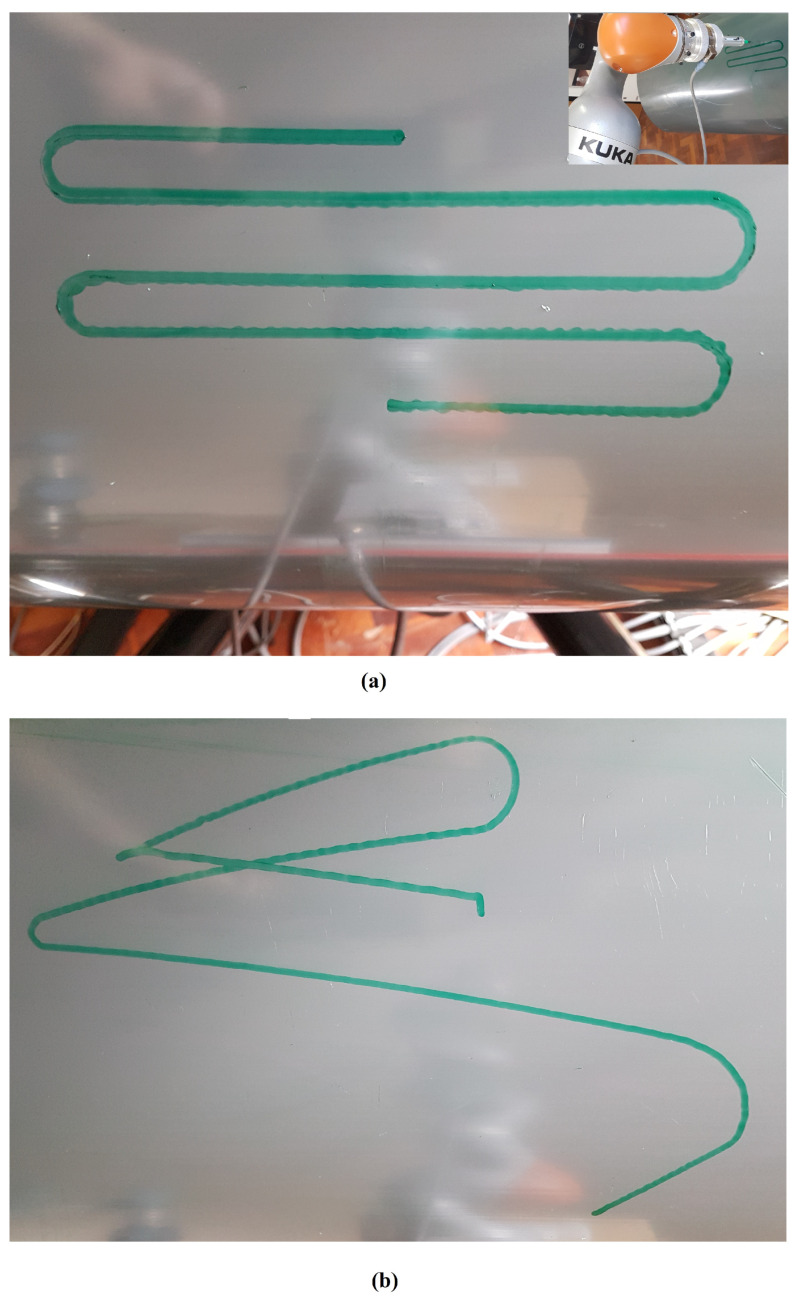
This study presents an experimental robotic setup with a Stewart platform and a robot manipulator to emulate an underwater vehicle-manipulator system (UVMS). This hardware-based emulator setup consists of a KUKA IIWA14 robotic manipulator mounted on a parallel manipulator, known as Stewart Platform, and a force/torque sensor attached to the end-effector of the robotic arm interacting with a pipe. In this setup, we use realistic underwater vehicle movements either communicated to a system in real-time through 4G routers or recorded in advance in a water tank environment. In addition, we simulate both the water current impact on vehicle movement and dynamic coupling effects between the vehicle and manipulator in a Gazebo-based software simulator and transfer these to the physical robotic experimental setup. Such a complete setup is useful to study the control techniques to be applied on the underwater robotic systems in a dry lab environment and allows us to carry out fast and numerous experiments, circumventing the difficulties with performing similar experiments and data collection with actual underwater vehicles in water tanks. Exemplary controller development studies are carried out for contact management of the UVMS using the experimental setup.
本研究提出了一种带有斯图尔特平台和机器人操纵器的实验性机器人装置,以模拟水下运载器-操纵器系统(UVMS)。这种基于硬件的模拟器装置由安装在一个称为斯图尔特平台的并联操纵器上的库卡IIWA14机器人操纵器,以及一个连接到与管道相互作用的机器人手臂末端执行器的力/扭矩传感器组成。在这个装置中,我们使用通过4G路由器实时传输到系统的逼真水下运载器运动,或者预先在水箱环境中记录的运动。此外,我们在基于Gazebo的软件模拟器中模拟水流对运载器运动的影响以及运载器和操纵器之间的动态耦合效应,并将这些效应传输到物理机器人实验装置中。这样一个完整的装置对于在干实验室环境中研究应用于水下机器人系统的控制技术很有用,并且使我们能够进行快速且大量的实验,避免了在水箱中使用实际水下运载器进行类似实验和数据收集的困难。使用该实验装置对UVMS的接触管理进行了示例性的控制器开发研究。