Fasola Jemina, Baud Romain, Vouga Tristan, Ijspeert Auke, Bouri Mohamed
Laboratory of Cognitive Neuroscience (LNCO), School of Life Sciences, Ecole Polytechnique Fédérale de Lausanne (EPFL), Geneva, Switzerland.
Biorobotics Laboratory (BIOROB), School of Engineering, Ecole Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland.
Front Robot AI. 2020 Nov 16;7:553828. doi: 10.3389/frobt.2020.553828. eCollection 2020.
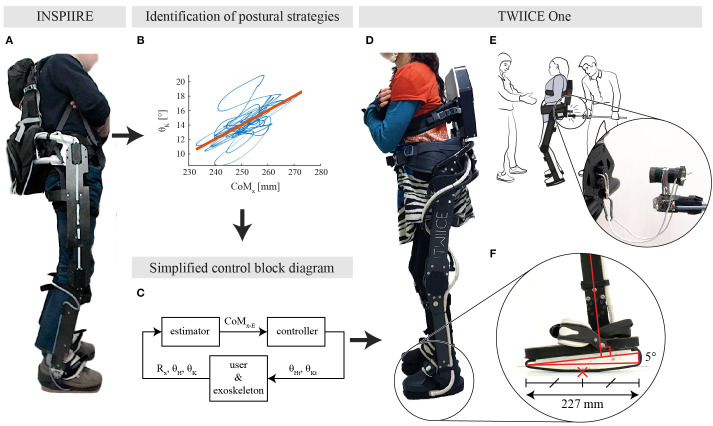
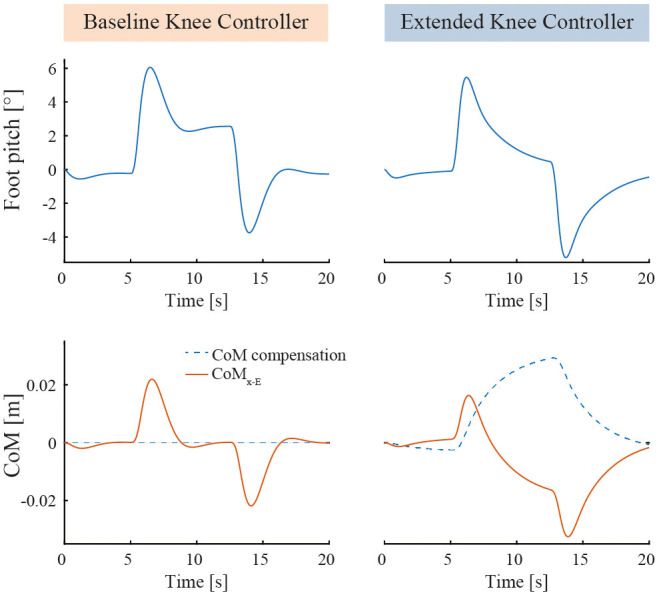
Several lower-limb exoskeletons enable overcoming obstacles that would impair daily activities of wheelchair users, such as going upstairs. Still, as most of the currently commercialized exoskeletons require the use of crutches, they prevent the user from interacting efficiently with the environment. In a previous study, a bio-inspired controller was developed to allow dynamic standing balance for such exoskeletons. It was however only tested on the device without any user. This work describes and evaluates a new controller that extends this previous one with an online model compensation, and the contribution of the hip joint against strong perturbations. In addition, both controllers are tested with the exoskeleton TWIICE One, worn by a complete spinal cord injury pilot. Their performances are compared by the mean of three tasks: standing quietly, resisting external perturbations, and lifting barbells of increasing weight. The new controller exhibits a similar performance for quiet standing, longer recovery time for dynamic perturbations but better ability to sustain prolonged perturbations, and higher weightlifting capability.
几种下肢外骨骼能够克服那些会妨碍轮椅使用者日常活动的障碍,比如上楼梯。然而,由于目前大多数商业化的外骨骼都需要使用拐杖,这就阻碍了使用者与环境进行高效互动。在之前的一项研究中,开发了一种受生物启发的控制器,以使此类外骨骼实现动态站立平衡。不过,它仅在没有任何使用者的设备上进行了测试。这项工作描述并评估了一种新的控制器,该控制器通过在线模型补偿扩展了前作,还评估了髋关节在抵抗强烈扰动方面的作用。此外,这两种控制器都在一名完全性脊髓损伤的试飞员所穿戴的TWIICE One外骨骼上进行了测试。通过三项任务对它们的性能进行比较:安静站立、抵抗外部扰动以及举起重量不断增加的杠铃。新控制器在安静站立时表现出相似的性能,在动态扰动时恢复时间更长,但维持长时间扰动的能力更强,并且举重能力更高。