Serni Sergio, Pecoraro Alessio, Sessa Francesco, Gemma Luca, Greco Isabella, Barzaghi Paolo, Grosso Antonio Andrea, Corti Francesco, Mormile Nicola, Spatafora Pietro, Caroassai Simone, Berni Alessandro, Gacci Mauro, Giancane Saverio, Tuccio Agostino, Sebastianelli Arcangelo, Li Marzi Vincenzo, Vignolini Graziano, Campi Riccardo
Unit of Urological Robotic Surgery and Renal Transplantation, Careggi Hospital, University of Florence, Florence, Italy.
Department of Experimental and Clinical Medicine, University of Florence, Florence, Italy.
Front Surg. 2021 Jan 15;7:588215. doi: 10.3389/fsurg.2020.588215. eCollection 2020.
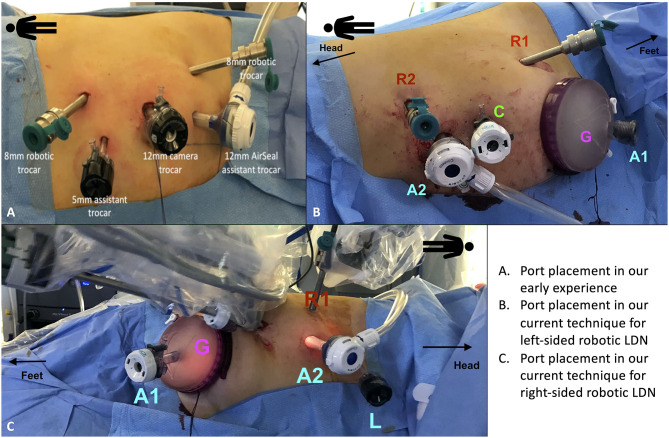
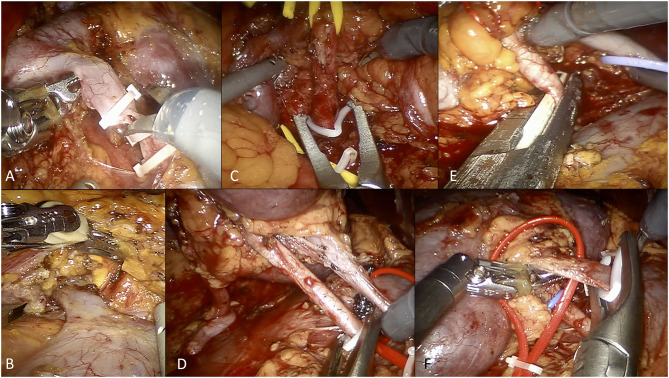
To provide a step-by-step overview of the University of Florence technique for robotic living donor nephrectomy (LDN), focusing on its technical nuances and perioperative outcomes. A dedicated robotic LDN program at our Institution was codified in 2012. Data from patients undergoing robotic LDN from 2012 to 2019 were prospectively collected. All robotic LDNs were performed by a highly experienced surgeon, using the da Vinci Si robotic platform in a three-arm configuration. In this report we provide a detailed overview of our surgical technique for robotic LDN. The main objective of the study was to evaluate the technical feasibility and safety of the technique, including perioperative surgical complications rate and mid-term functional outcomes. Overall, 36 patients undergoing robotic LDNs were included in the study. Of these, 28 (78%) were left LDNs. Median (IQR) donor pre-operative eGFR was 88 (75.6-90) ml/min/1.73 m. In all cases, robotic LDN was completed without need of conversion. The median (IQR) overall operative time was 230 (195-258) min, while the median console time was 133 (IQR 117-166) min. The median (IQR) warm ischemia time was 175 (140-255) s. No intraoperative adverse events or 90-d major surgical complications were recorded. At a median (IQR) follow-up of 24 months (IQR 11-46), median (IQR) eGFR patients undergoing in living donor nephrectomy was 57.4 (47.9; 63.9) ml/min/1.73 m. In our experience, robotic LDN is technically feasible and safe. The use of robotic surgery for LDN may provide distinct advantages for surgeons while ensuring optimal donors' perioperative and functional outcomes.
提供佛罗伦萨大学机器人活体供肾切除术(LDN)技术的分步概述,重点关注其技术细节和围手术期结果。我们机构于2012年编纂了专门的机器人LDN项目。前瞻性收集了2012年至2019年接受机器人LDN患者的数据。所有机器人LDN均由经验丰富的外科医生使用da Vinci Si机器人平台以三臂配置进行。在本报告中,我们提供了机器人LDN手术技术的详细概述。该研究的主要目的是评估该技术的技术可行性和安全性,包括围手术期手术并发症发生率和中期功能结果。总体而言,36例接受机器人LDN的患者被纳入研究。其中,28例(78%)为左侧LDN。供体术前估算肾小球滤过率(eGFR)的中位数(四分位间距)为88(75.6 - 90)ml/min/1.73 m²。在所有病例中,机器人LDN均无需中转即可完成。总手术时间的中位数(四分位间距)为230(195 - 258)分钟,而控制台操作时间的中位数为133(四分位间距117 - 166)分钟。热缺血时间的中位数(四分位间距)为175(140 - 255)秒。未记录术中不良事件或90天内的重大手术并发症。在中位数(四分位间距)为24个月(四分位间距11 - 46)的随访中,接受活体供肾切除术患者的eGFR中位数(四分位间距)为57.4(47.9;63.9)ml/min/1.73 m²。根据我们的经验,机器人LDN在技术上是可行且安全的。使用机器人手术进行LDN可能为外科医生带来明显优势,同时确保供体获得最佳的围手术期和功能结果。