Ma Xu, Zhou Jinpeng, Zhang Xu, Qi Yang, Huang Xiaochen
Tianjin Key Laboratory for Control Theory & Applications in Complicated Industry Systems, College of Electrical and Electronic Engineering, Tianjin University of Technology, Tianjin, China 300384.
Tianjin Key Laboratory of High Speed Cutting and Precision Machining, School of Mechanical Engineering, Tianjin University of Technology and Education, Tianjin, China 300222.
Appl Bionics Biomech. 2021 Jan 28;2021:8898311. doi: 10.1155/2021/8898311. eCollection 2021.
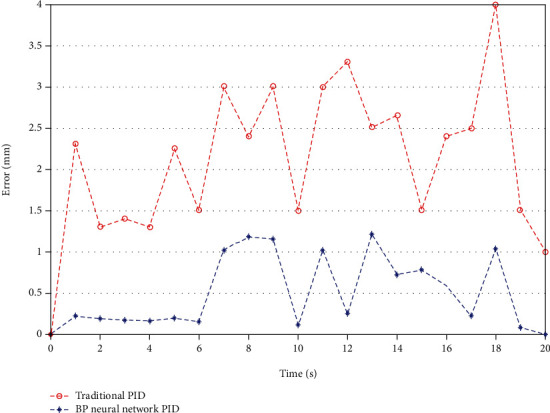
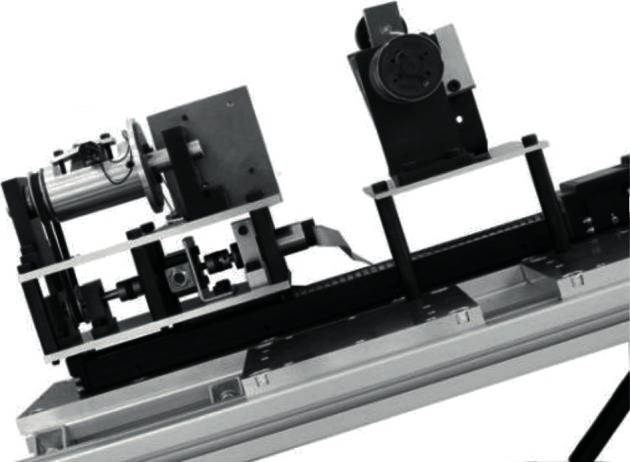
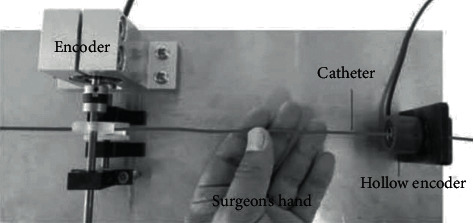
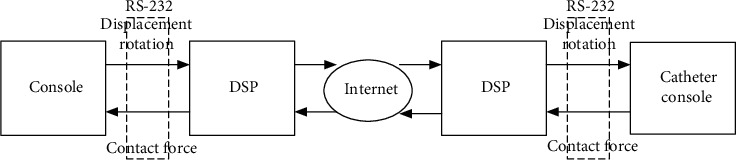
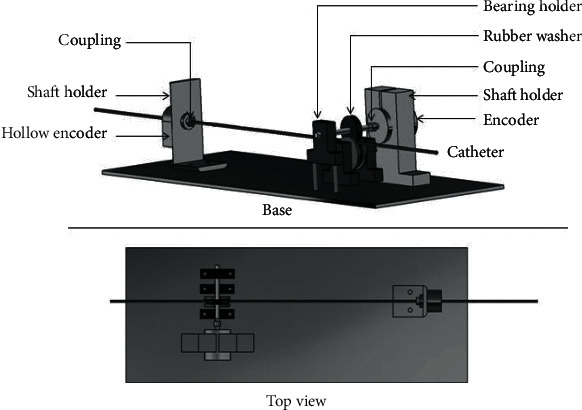
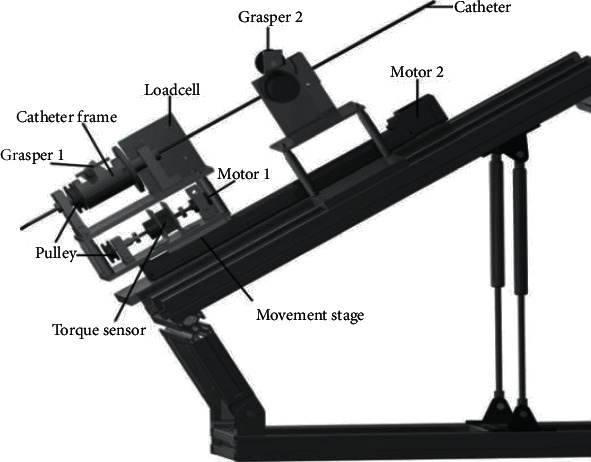
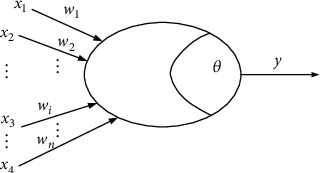
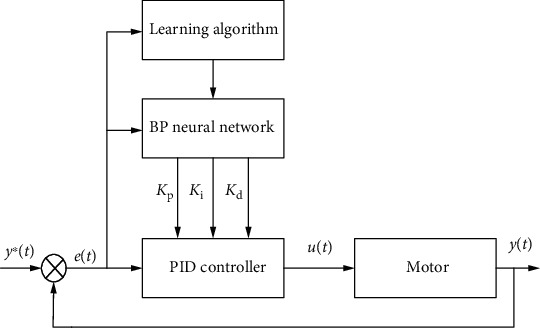
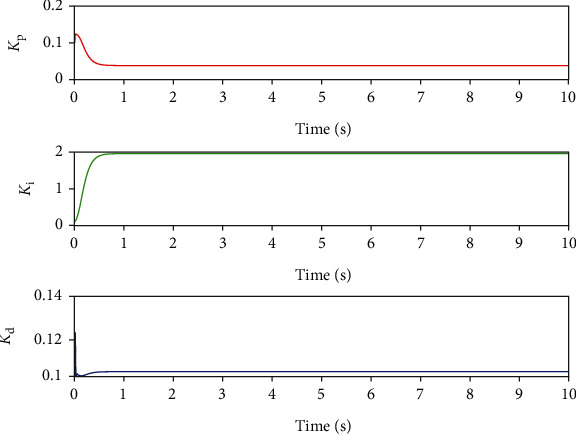
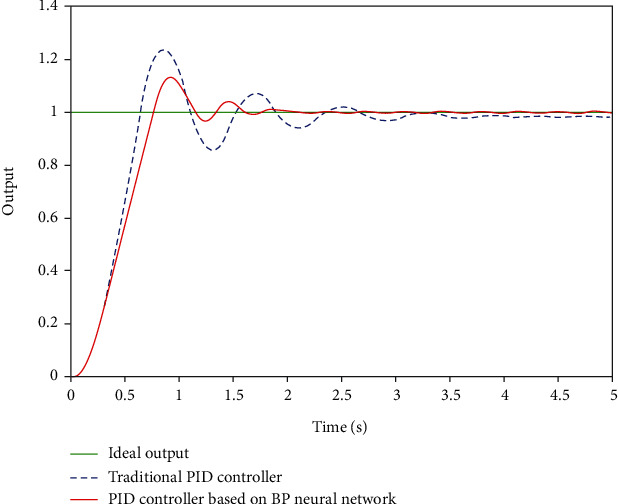
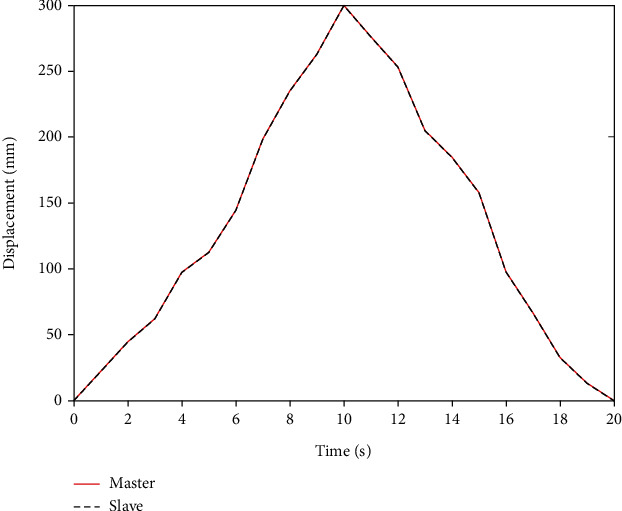
In interventional surgery, the manual operation of the catheter is not accurate. It is necessary to operate the catheter skillfully and effectively to protect the surgeon from radiation injury. The purpose of this paper is to design a new robot catheter operating system, which can help surgeons to complete the operation with high mechanical precision. On the basis of the original mechanical structure-real catheter, the operation information of the main end operator is collected. After the information is collected, the control algorithm of the system is improved, and the BP neural network is combined with the traditional PID controller to adjust the PID control parameters more effectively and intelligently so that the motor can reflect the output of the controller better and faster. The feasibility and superiority of the BP neural network PID controller are verified by simulation experiments.
在介入手术中,导管的手动操作不够精确。需要熟练且有效地操作导管,以保护外科医生免受辐射伤害。本文的目的是设计一种新型机器人导管操作系统,该系统能够帮助外科医生以高机械精度完成手术。在原有机械结构——真实导管的基础上,收集主端操作者的操作信息。收集信息后,改进系统的控制算法,将BP神经网络与传统PID控制器相结合,更有效、更智能地调整PID控制参数,使电机能更好、更快地反映控制器的输出。通过仿真实验验证了BP神经网络PID控制器的可行性和优越性。