Department of Radiology, St-Eloi University Hospital, 80 avenue Augustin Fliche, 34295, Montpellier, France.
Department of Interventional Radiology, Gustave Roussy Institut, Villejuif, France.
Sci Rep. 2021 Mar 4;11(1):5218. doi: 10.1038/s41598-021-84878-3.
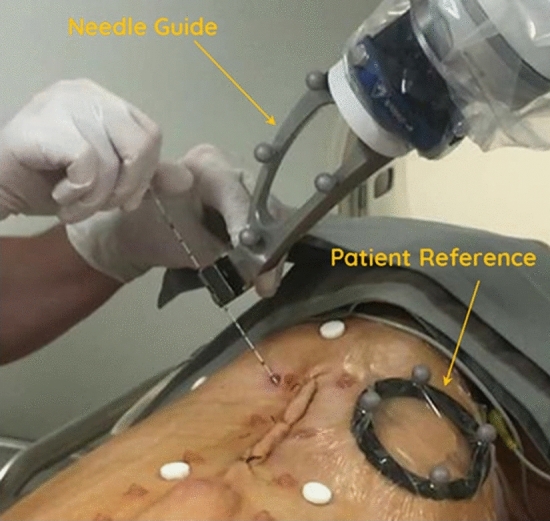
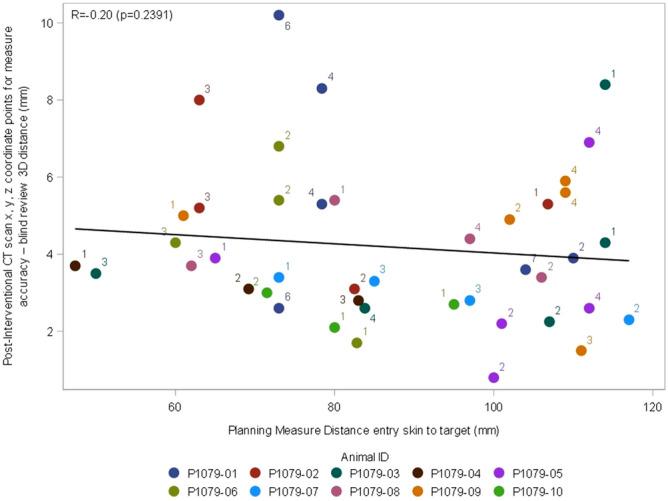
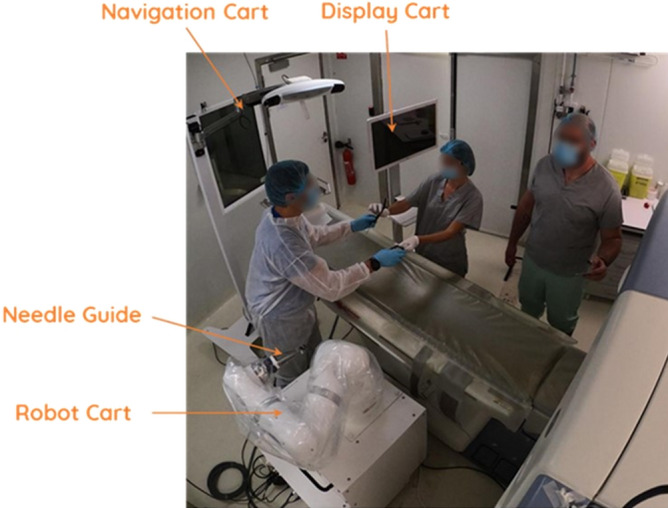
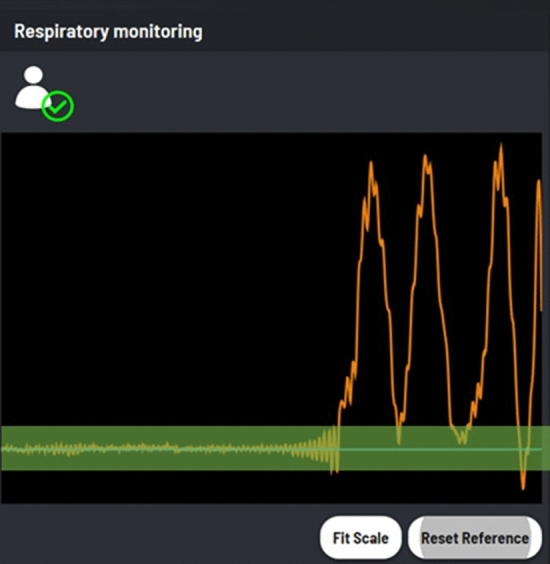
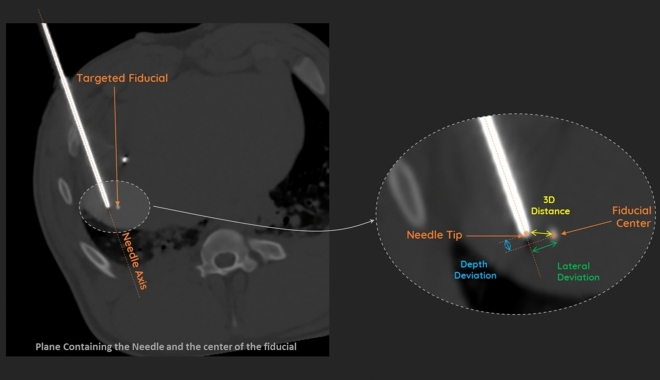
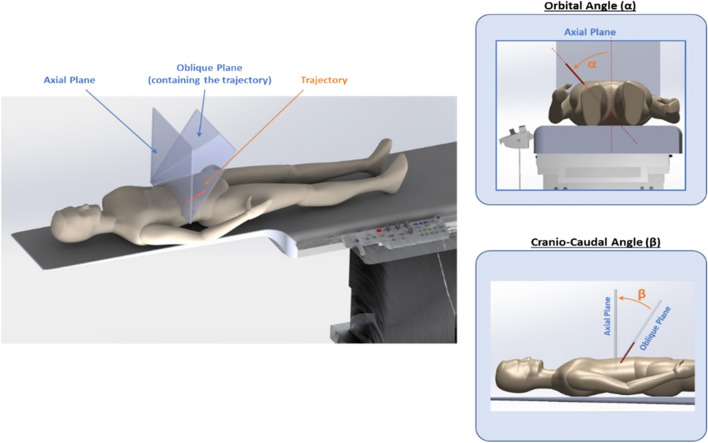
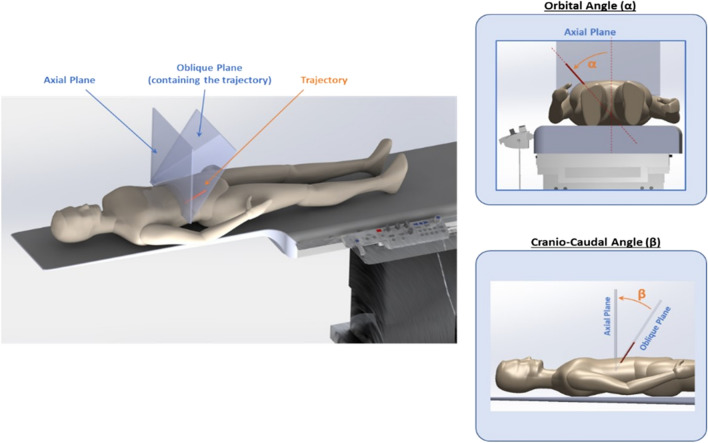
Evaluate the feasibility, safety and accuracy of a CT-guided robotic assistance for percutaneous needle placement in the liver. Sixty-six fiducials were surgically inserted into the liver of ten swine and used as targets for needle insertions. All CT-scan acquisitions and robotically-assisted needle insertions were coordinated with breath motion using respiratory monitoring. Skin entry and target points were defined on planning CT-scan. Then, robotically-assisted insertions of 17G needles were performed either by experienced interventional radiologists or by a novice. Post-needle insertion CT-scans were acquired to assess accuracy (3D deviation, ie. distance from needle tip to predefined target) and safety. All needle insertions (43/43; median trajectory length = 83 mm (interquartile range [IQR] 72-105 mm) could be performed in one (n = 36) or two (n = 7) attempts (100% feasibility). Blinded evaluation showed an accuracy of 3.5 ± 1.3 mm. Accuracy did not differ between novice and experienced operators (3.7 ± 1.3 versus 3.4 ± 1.2 mm, P = 0.44). Neither trajectory angulation nor trajectory length significantly impacted accuracy. No complications were encountered. Needle insertion using the robotic device was shown feasible, safe and accurate in a swine liver model. Accuracy was influenced neither by the trajectory length nor by trajectory angulations nor by operator's experience. A prospective human clinical trial is recruiting.
评估 CT 引导下机器人辅助经皮肝脏穿刺针放置的可行性、安全性和准确性。将 66 个基准标记物经手术植入 10 头猪的肝脏中,并用作穿刺针插入的靶标。所有 CT 扫描采集和机器人辅助的针插入均使用呼吸监测与呼吸运动相协调。在计划 CT 扫描上定义皮肤进入点和目标点。然后,由经验丰富的介入放射科医生或新手执行机器人辅助的 17G 针插入。进行针插入后 CT 扫描以评估准确性(3D 偏差,即从针尖到预定目标的距离)和安全性。所有的针插入(43/43;中位数轨迹长度= 83mm(四分位距 [IQR] 72-105mm),可在一次(n=36)或两次(n=7)尝试中完成(100%的可行性)。盲法评估显示准确性为 3.5±1.3mm。新手和经验丰富的操作者之间的准确性没有差异(3.7±1.3 与 3.4±1.2mm,P=0.44)。轨迹角度和轨迹长度均不影响准确性。未发生并发症。在猪肝脏模型中,使用机器人设备进行的针插入术显示出可行性、安全性和准确性。准确性既不受轨迹长度的影响,也不受轨迹角度和操作者经验的影响。一项前瞻性的人类临床试验正在招募中。