Hoelscher Janine, Fu Mengyu, Fried Inbar, Emerson Maxwell, Ertop Tayfun Efe, Rox Margaret, Kuntz Alan, Akulian Jason A, Webster Robert J, Alterovitz Ron
Department of Computer Science, University of North Carolina at Chapel Hill, Chapel Hill, NC 27599, USA.
Department of Mechanical Engineering, Vanderbilt University, Nashville, TN 37235, USA.
IEEE Robot Autom Lett. 2021 Apr;6(2):3987-3994. doi: 10.1109/lra.2021.3066962. Epub 2021 Mar 17.
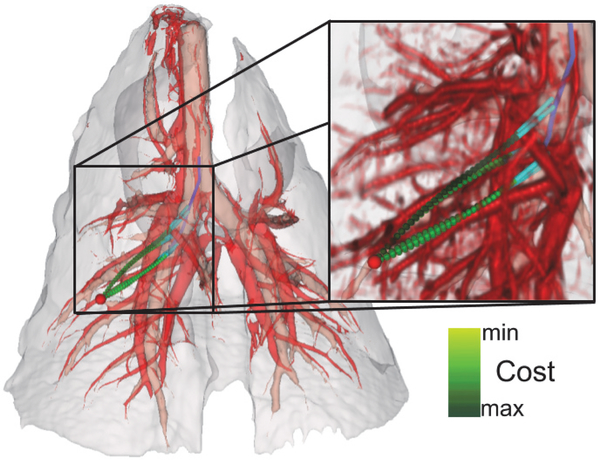
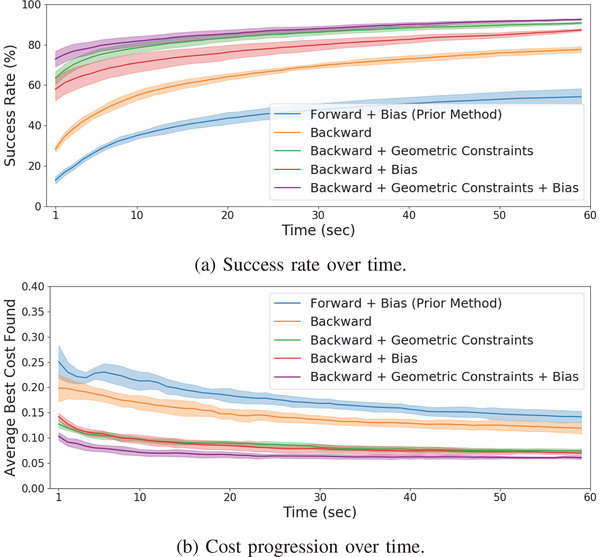
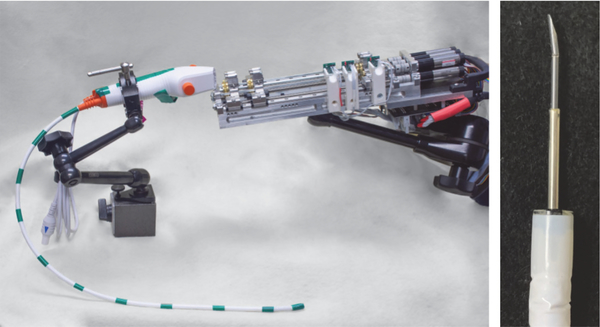
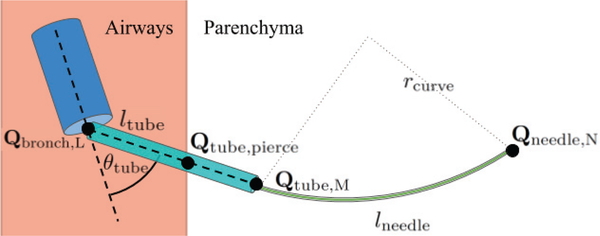
Lung cancer is one of the deadliest types of cancer, and early diagnosis is crucial for successful treatment. Definitively diagnosing lung cancer typically requires biopsy, but current approaches either carry a high procedural risk for the patient or are incapable of reaching many sites of clinical interest in the lung. We present a new sampling-based planning method for a steerable needle lung robot that has the potential to accurately reach targets in most regions of the lung. The robot comprises three stages: a transorally deployed bronchoscope, a sharpened piercing tube (to pierce into the lung parenchyma from the airways), and a steerable needle able to navigate to the target. Planning for the sequential deployment of all three stages under health safety concerns is a challenging task, as each stage depends on the previous one. We introduce a new backward planning approach that starts at the target and advances backwards toward the airways with the goal of finding a piercing site reachable by the bronchoscope. This new strategy enables faster performance by iteratively building a single search tree during the entire computation period, whereas previous forward approaches have relied on repeating this expensive tree construction process many times. Additionally, our method further reduces runtime by employing biased sampling and sample rejection based on geometric constraints. We evaluate this approach using simulation-based studies in anatomical lung models. We demonstrate in comparison with existing techniques that the new approach (i) is more likely to find a path to a target, (ii) is more efficient by reaching targets more than 5 times faster on average, and (iii) arrives at lower-risk paths in shorter time.
肺癌是最致命的癌症类型之一,早期诊断对于成功治疗至关重要。明确诊断肺癌通常需要活检,但目前的方法要么给患者带来较高的操作风险,要么无法到达肺部许多临床关注的部位。我们提出了一种基于采样的新型规划方法,用于可操纵针式肺部机器人,该机器人有潜力准确到达肺部大多数区域的目标。该机器人包括三个阶段:经口部署的支气管镜、尖锐的穿刺管(用于从气道刺入肺实质)和能够导航至目标的可操纵针。在健康安全问题下规划所有三个阶段的顺序部署是一项具有挑战性的任务,因为每个阶段都依赖于前一个阶段。我们引入了一种新的逆向规划方法,该方法从目标开始并向气道逆向推进,目的是找到支气管镜可到达的穿刺部位。这种新策略通过在整个计算期间迭代构建单个搜索树来实现更快的性能,而以前的正向方法依赖于多次重复这个昂贵的树构建过程。此外,我们的方法通过采用基于几何约束的有偏采样和样本拒绝进一步减少了运行时间。我们在解剖学肺部模型中使用基于模拟的研究来评估这种方法。与现有技术相比,我们证明新方法(i)更有可能找到通往目标的路径,(ii)平均到达目标的速度快5倍以上,效率更高,(iii)在更短的时间内到达风险更低的路径。