Health and Social Sciences Cluster, Singapore Institute of Technology, Singapore, Singapore.
Human Sensorimotor Control Laboratory, School of Kinesiology, University of Minnesota, Minneapolis, USA.
J Neuroeng Rehabil. 2021 May 10;18(1):77. doi: 10.1186/s12984-021-00871-x.
Proprioceptive deficits after stroke are associated with poor upper limb function, slower motor recovery, and decreased self-care ability. Improving proprioception should enhance motor control in stroke survivors, but current evidence is inconclusive. Thus, this study examined whether a robot-aided somatosensory-based training requiring increasingly accurate active wrist movements improves proprioceptive acuity as well as motor performance in chronic stroke.
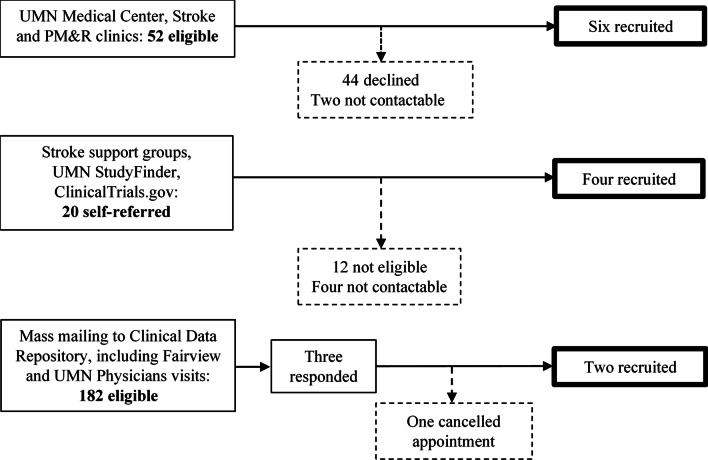
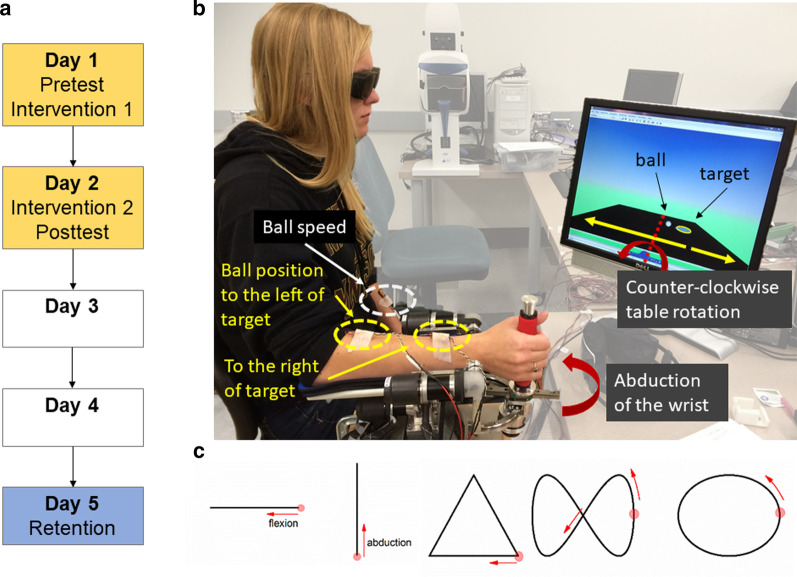
Twelve adults with chronic stroke completed a 2-day training (age range: 42-74 years; median time-after-stroke: 12 months; median Fugl-Meyer UE: 65). Retention was assessed at Day 5. Grasping the handle of a wrist-robotic exoskeleton, participants trained to roll a virtual ball to a target through continuous wrist adduction/abduction movements. During training vision was occluded, but participants received real-time, vibro-tactile feedback on their forearm about ball position and speed. Primary outcome was the just-noticeable-difference (JND) wrist position sense threshold as a measure of proprioceptive acuity. Secondary outcomes were spatial error in an untrained wrist tracing task and somatosensory-evoked potentials (SEP) as a neural correlate of proprioceptive function. Ten neurologically-intact adults were recruited to serve as non-stroke controls for matched age, gender and hand dominance (age range: 44 to 79 years; 6 women, 4 men).
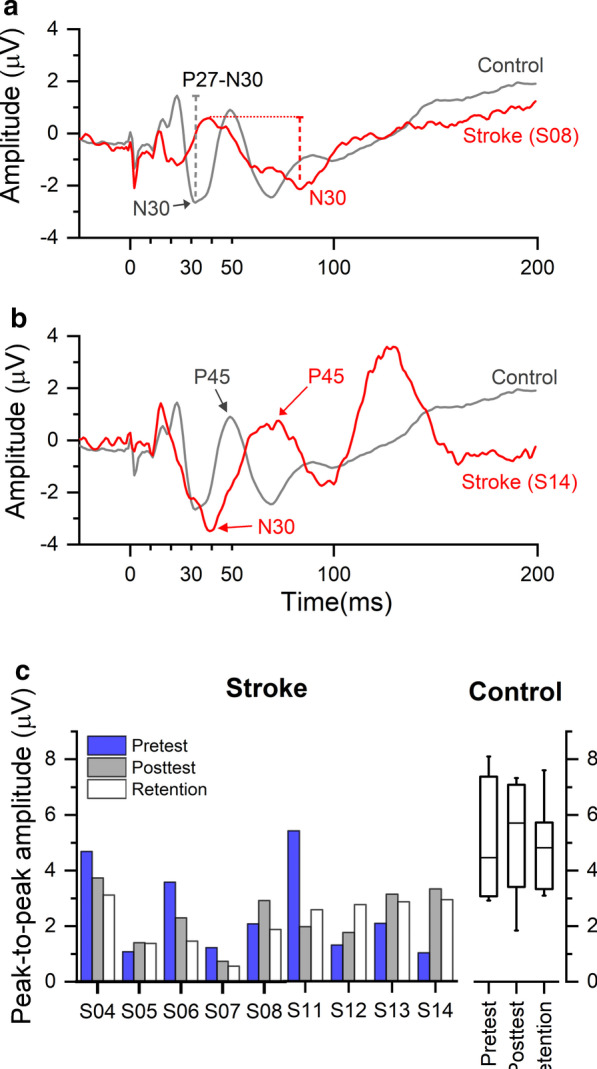
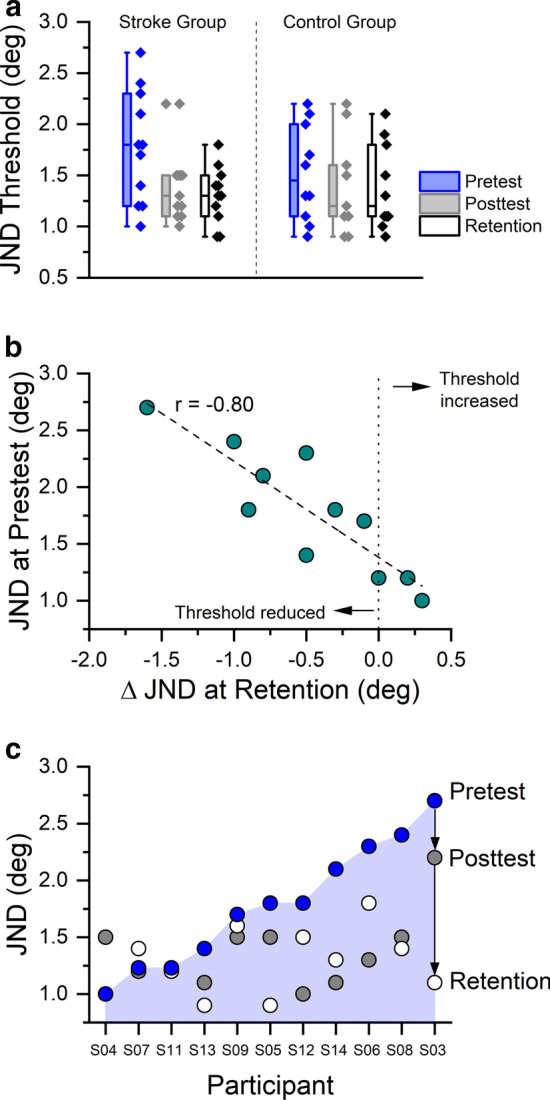
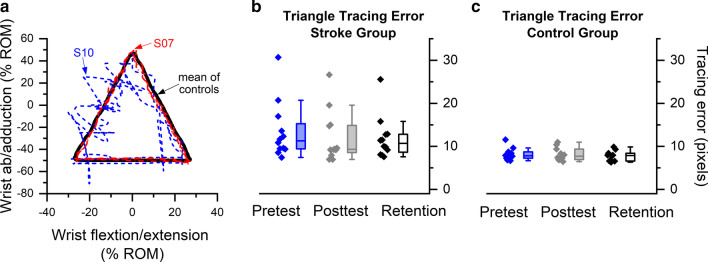
Participants significantly reduced JND thresholds at posttest and retention (Stroke group: pretest: mean: 1.77° [SD: 0.54°] to posttest mean: 1.38° [0.34°]; Control group: 1.50° [0.46°] to posttest mean: 1.45° [SD: 0.54°]; F[2,37] = 4.54, p = 0.017, η = 0.20) in both groups. A higher pretest JND threshold was associated with a higher threshold reduction at posttest and retention (r = - 0.86, - 0.90, p ≤ 0.001) among the stroke participants. Error in the untrained tracing task was reduced by 22 % at posttest, yielding an effect size of w = 0.13. Stroke participants exhibited significantly reduced P27-N30 peak-to-peak SEP amplitude at pretest (U = 11, p = 0.03) compared to the non-stroke group. SEP measures did not change systematically with training.
This study provides proof-of-concept that non-visual, proprioceptive training can induce fast, measurable improvements in proprioceptive function in chronic stroke survivors. There is encouraging but inconclusive evidence that such somatosensory learning transfers to untrained motor tasks. Trial registration Clinicaltrials.gov; Registration ID: NCT02565407; Date of registration: 01/10/2015; URL: https://clinicaltrials.gov/ct2/show/NCT02565407 .
脑卒中后本体感觉缺失与上肢功能不良、运动恢复较慢和自理能力下降有关。改善本体感觉应该会增强脑卒中幸存者的运动控制能力,但目前的证据尚无定论。因此,本研究旨在探讨基于机器人的体感训练是否能提高慢性脑卒中患者的本体感觉敏锐度和运动表现,该训练需要进行越来越精确的主动腕部运动。
12 名慢性脑卒中患者完成了为期 2 天的训练(年龄范围:42-74 岁;中位脑卒中后时间:12 个月;中位 Fugl-Meyer UE:65)。在第 5 天评估保留情况。参与者握住手腕机器人外骨骼的手柄,通过连续的腕关节内收/外展运动将虚拟球滚动到目标位置。训练期间视觉被遮挡,但参与者在前臂上会接收到关于球位置和速度的实时振动触觉反馈。主要结果是腕部位置感觉阈值的刚好可察觉差异(JND),作为本体感觉敏锐度的测量值。次要结果是在未训练的腕部追踪任务中的空间误差和体感诱发电位(SEP),作为本体感觉功能的神经相关物。10 名神经正常的成年人被招募为年龄、性别和手优势相匹配的非脑卒中对照组(年龄范围:44-79 岁;6 名女性,4 名男性)。
在脑卒中患者中,JND 阈值在测试后和保留期显著降低(脑卒中组:预测试平均:1.77°[0.54°]至测试后平均:1.38°[0.34°];对照组:1.50°[0.46°]至测试后平均:1.45°[0.54°];F[2,37] = 4.54,p = 0.017,η = 0.20)。较高的预测试 JND 阈值与测试后和保留期更高的阈值降低有关(r = -0.86,-0.90,p ≤ 0.001)。在未训练的追踪任务中,错误减少了 22%,产生了 w = 0.13 的效应量。与非脑卒中组相比,脑卒中患者在预测试时 P27-N30 峰峰值体感诱发电位振幅显著降低(U = 11,p = 0.03)。SEP 测量值并未随着训练而系统地变化。
本研究提供了概念验证,证明非视觉本体感觉训练可以在慢性脑卒中幸存者中快速、可测量地改善本体感觉功能。有令人鼓舞但尚无定论的证据表明,这种体感学习可以转移到未训练的运动任务中。试验注册 Clinicaltrials.gov;注册号:NCT02565407;注册日期:2015 年 1 月 10 日;网址:https://clinicaltrials.gov/ct2/show/NCT02565407。