Key Laboratory of Bionic Engineering Ministry of Education Jilin University Changchun Jilin 130022 P. R. China.
Adv Sci (Weinh). 2021 Mar 2;8(9):2002017. doi: 10.1002/advs.202002017. eCollection 2021 May.
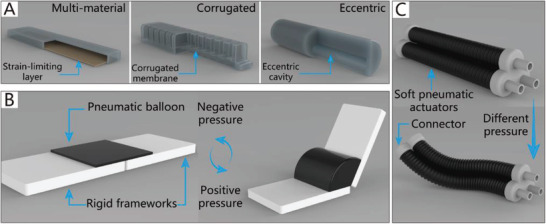
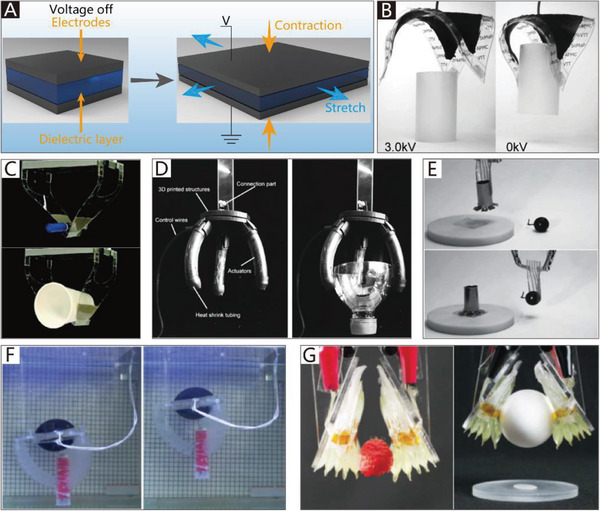
Grasping and manipulation are fundamental ways for many creatures to interact with their environments. Different morphologies and grasping methods of "grippers" are highly evolved to adapt to harsh survival conditions. For example, human hands and bird feet are composed of rigid frames and soft joints. Compared with human hands, some plants like Drosera do not have rigid frames, so they can bend at arbitrary points of the body to capture their prey. Furthermore, many muscular hydrostat animals and plant tendrils can implement more complex twisting motions in 3D space. Recently, inspired by the flexible grasping methods present in nature, increasingly more bio-inspired soft grippers have been fabricated with compliant and soft materials. Based on this, the present review focuses on the recent research progress of bio-inspired soft grippers based on impactive gripping. According to their types of movement and a classification model inspired by biological "grippers", soft grippers are classified into three types, namely, non-continuum bending-type grippers, continuum bending-type grippers, and continuum twisting-type grippers. An exhaustive and updated analysis of each type of gripper is provided. Moreover, this review offers an overview of the different stiffness-controllable strategies developed in recent years.
抓取和操作是许多生物与环境交互的基本方式。不同的“夹具”形态和抓取方法高度进化,以适应恶劣的生存条件。例如,人类的手和鸟类的脚由刚性框架和柔软的关节组成。与人类的手相比,一些植物,如茅膏菜,没有刚性框架,因此它们可以在身体的任意点弯曲,以捕捉猎物。此外,许多肌肉液压动物和植物卷须可以在 3D 空间中执行更复杂的扭曲运动。最近,受自然界中灵活抓取方法的启发,越来越多的基于顺应性和柔软材料的仿生软夹被制造出来。基于此,本综述重点介绍了基于冲击抓取的仿生软夹的最新研究进展。根据它们的运动类型和受生物“夹具”启发的分类模型,软夹分为非连续弯曲式夹、连续弯曲式夹和连续扭转式夹三种类型。对每种类型的夹具进行了详尽和更新的分析。此外,本综述还概述了近年来开发的不同刚度可控策略。