Centre for Automation and Robotics (CAR), Universidad Politécnica de Madrid-Consejo Superior de Investigaciones Científicas, 28006 Madrid, Spain.
Sensors (Basel). 2021 May 8;21(9):3253. doi: 10.3390/s21093253.
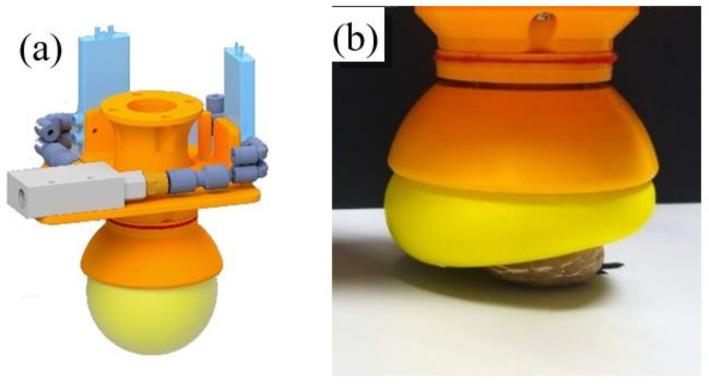
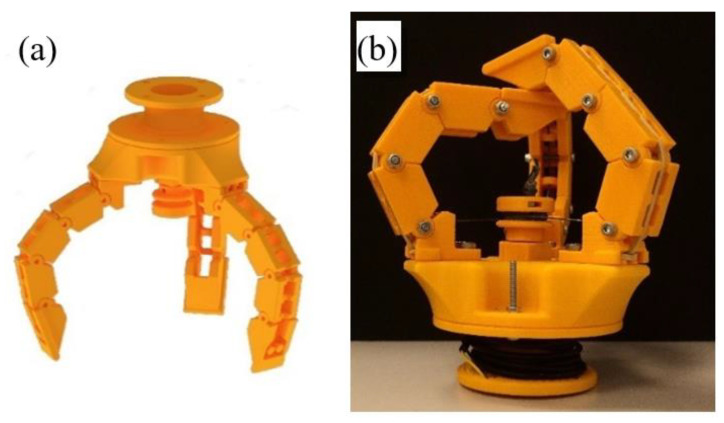
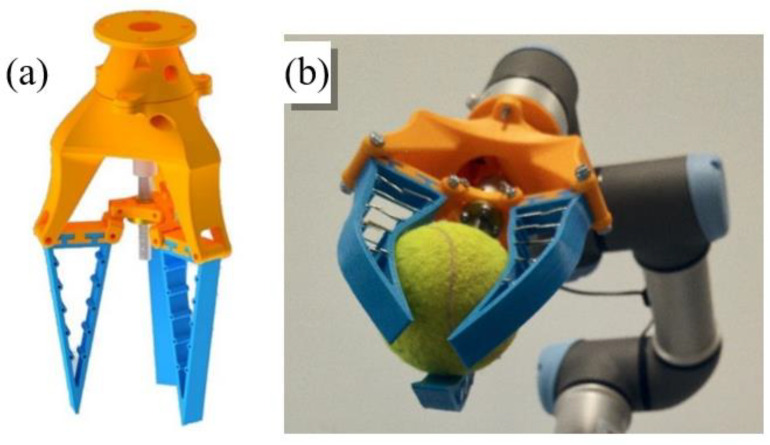
Soft grippers have experienced a growing interest due to their considerable flexibility that allows them to grasp a variety of objects, in contrast to hard grippers, which are designed for a specific item. One of their most remarkable characteristics is the ability to manipulate soft objects without damaging them. This, together with their wide range of applications and the use of novels materials and technologies, renders them a very robust device. In this paper, we present a comparison of different technologies for soft robotics grippers. We fabricated and tested four grippers. Two use pneumatic actuation (the gripper with chambered fingers and the jamming gripper), while the other two employ electromechanical actuation (the tendon driver gripper and the gripper with passive structure). For the experiments, a group of twelve objects with different mechanical and geometrical properties have been selected. Furthermore, we analyzed the effect of the environmental conditions on the grippers, by testing each object in three different environments: normal, humid, and dusty. The aim of this comparative study is to show the different performances of different grippers tested under the same conditions. Our findings indicate that we can highlight that the mechanical gripper with a passive structure shows greater robustness.
软夹爪因其相当的灵活性而受到越来越多的关注,这使得它们能够抓取各种不同的物体,而硬夹爪则是专门为特定物品而设计的。它们最显著的特点之一是能够在不损坏物体的情况下操作柔软的物体。此外,由于它们具有广泛的应用、使用新颖的材料和技术,使得它们成为一种非常坚固的设备。在本文中,我们比较了不同的软机器人夹爪技术。我们制造和测试了四个夹爪。其中两个使用气动致动(带腔指的夹爪和卡紧夹爪),而另外两个则采用机电致动(肌腱驱动器夹爪和具有被动结构的夹爪)。对于实验,选择了一组具有不同机械和几何特性的十二个物体。此外,我们通过在三种不同的环境(正常、潮湿和多尘)中测试每个物体,分析了环境条件对夹爪的影响。本比较研究的目的是展示在相同条件下测试的不同夹爪的不同性能。我们的研究结果表明,我们可以强调具有被动结构的机械夹爪具有更大的鲁棒性。