Software Research Group, Universidad Pedagógica y Tecnológica de Colombia, Av. Central del Norte 39-115, Tunja 150001, Colombia.
Posgraduate Program in Electrical Engineering, Federal University of Espírito Santo, Av. Fernando Ferrari, 514, Vitoria 29075-910, Brazil.
Sensors (Basel). 2021 Jun 25;21(13):4344. doi: 10.3390/s21134344.
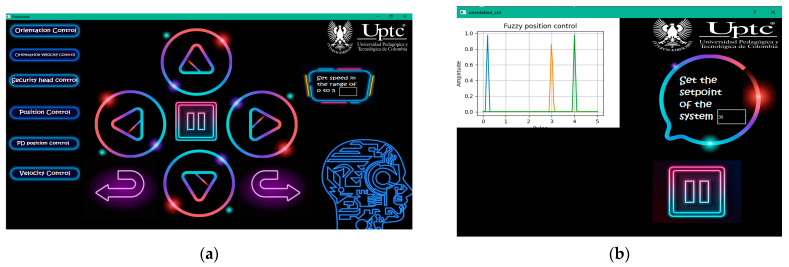
The design and implementation of an electronic system that involves head movements to operate a prototype that can simulate future movements of a wheelchair was developed here. The controller design collects head-movements data through a MEMS sensor-based motion capture system. The research was divided into four stages: First, the instrumentation of the system using hardware and software; second, the mathematical modeling using the theory of dynamic systems; third, the automatic control of position, speed, and orientation with constant and variable speed; finally, system verification using both an electronic controller test protocol and user experience. The system involved a graphical interface for the user to interact with it by executing all the controllers in real time. Through the System Usability Scale (SUS), a score of 78 out of 100 points was obtained from the qualification of 10 users who validated the system, giving a connotation of "very good". Users accepted the system with the recommendation to improve safety by using laser sensors instead of ultrasonic range modules to enhance obstacle detection.
这里开发了一个电子系统,该系统涉及头部运动以操作原型,该原型可以模拟轮椅的未来运动。控制器设计通过基于 MEMS 传感器的运动捕捉系统收集头部运动数据。研究分为四个阶段:首先,使用硬件和软件对系统进行仪器化;其次,使用动态系统理论进行数学建模;再次,使用恒速和变速进行位置、速度和方向的自动控制;最后,使用电子控制器测试协议和用户体验对系统进行验证。系统涉及一个图形界面,用户可以通过实时执行所有控制器与之交互。通过系统可用性量表(SUS),从验证系统的 10 位用户中获得了 78 分(满分 100 分),这意味着“非常好”。用户接受了该系统,并建议通过使用激光传感器代替超声波测距模块来提高安全性,以增强障碍物检测。