Lin Maohua, Vatani Morteza, Choi Jae-Won, Dilibal Savas, Engeberg Erik D
Department of Ocean and Mechanical Engineering, Florida Atlantic University, Boca Raton, FL 33431, USA.
University of Akron, Mechanical Engineering Department, Akron, OH, 44325, USA.
Sens Actuators A Phys. 2020 Nov 1;315. doi: 10.1016/j.sna.2020.112221. Epub 2020 Aug 10.
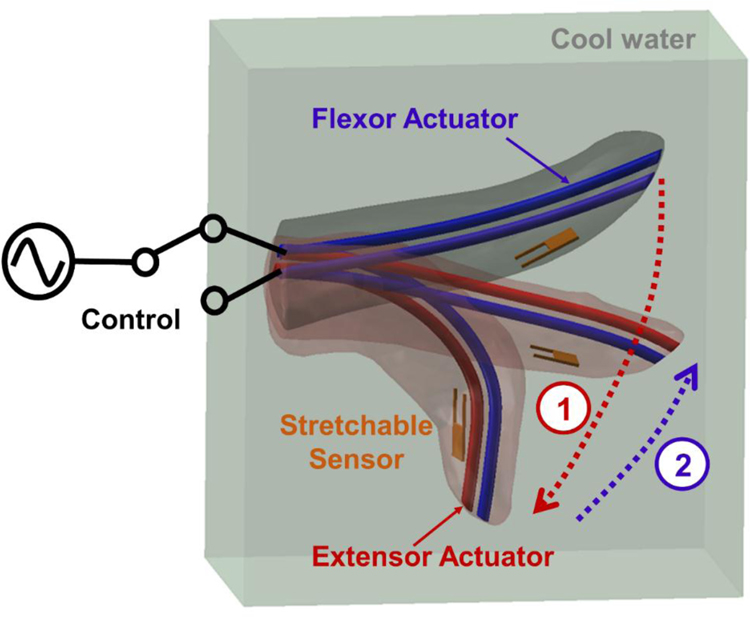
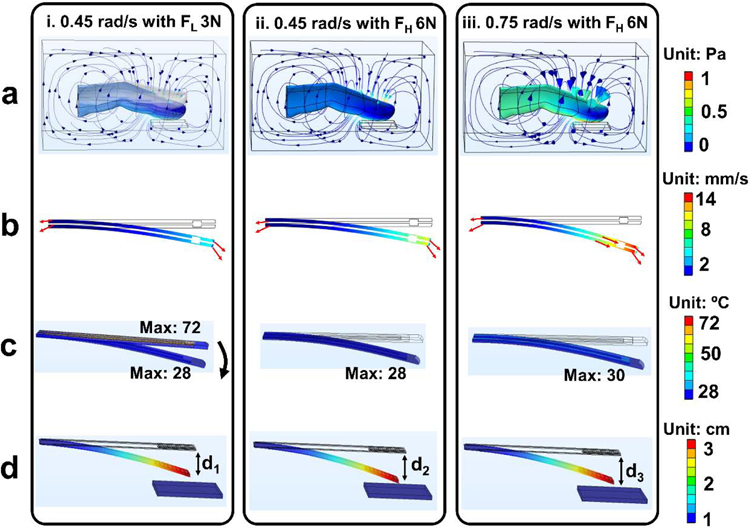
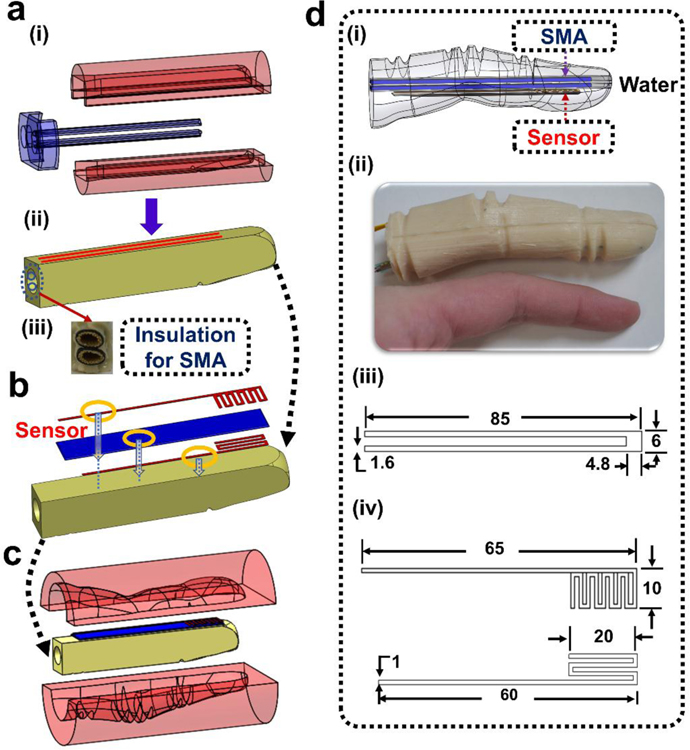
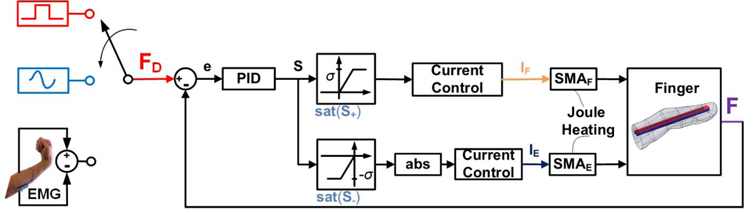
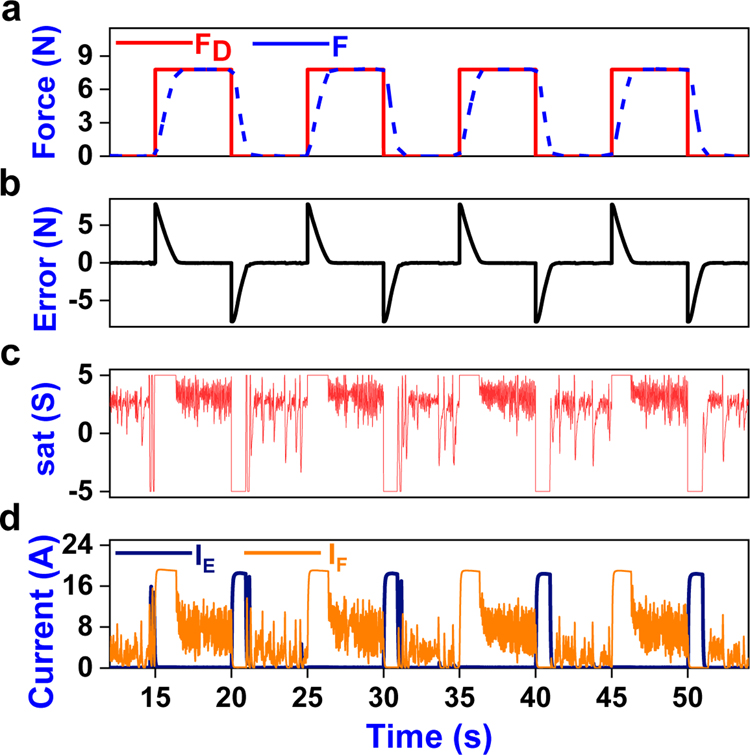
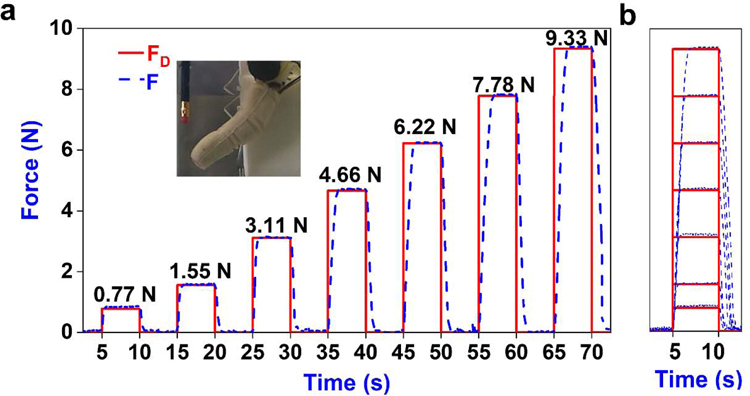
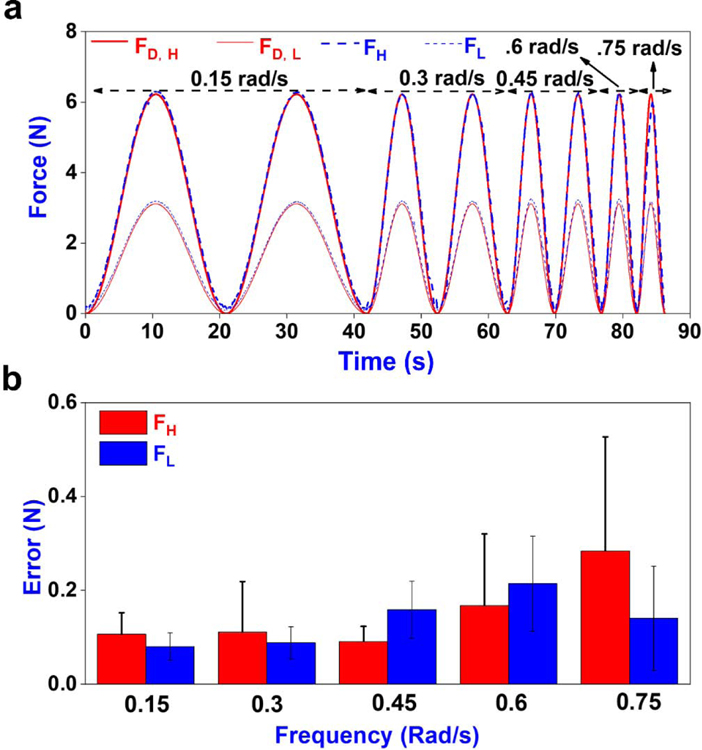
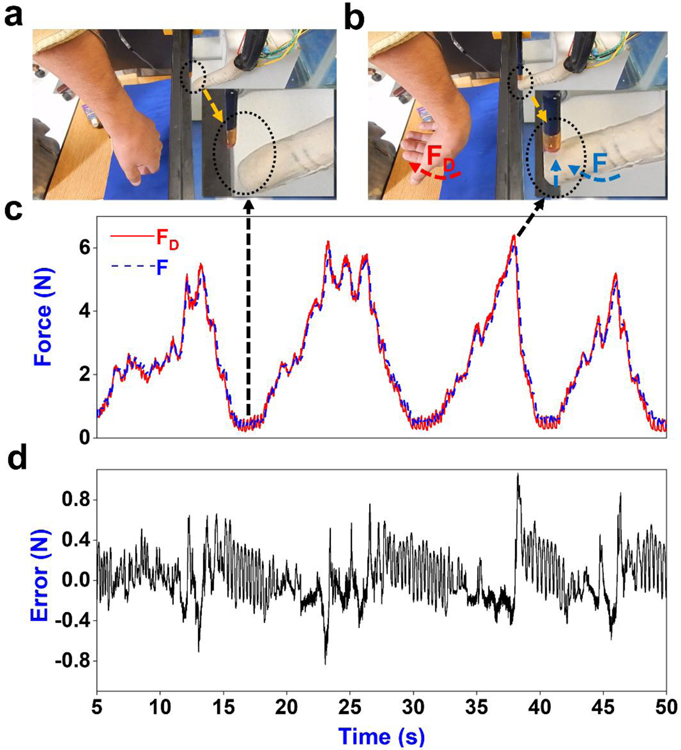
Design, sensing, and control of underwater gripping systems remain challenges for soft robotic manipulators. Our study investigates these critical issues by designing a shape memory alloy (SMA) actuation system for a soft robotic finger with a directly 3D-printed stretchable skin-like tactile sensor. SMA actuators were thermomechanically trained to assume a curved finger-like shape when Joule heated, and the flexible multi-layered tactile sensor was directly 3D-printed onto the surface of the fingertip. A nonlinear controller was developed to enable precise fingertip force control using feedback from the compliant tactile sensor. Underwater experiments were conducted using closed-loop force feedback from the directly 3D-printed tactile sensor with the SMA actuators, showing satisfactory force tracking ability. Furthermore, a 3D finite element model was developed to more deeply understand the shape memory thermal-fluidic-structural multi-physics simulation of the manipulator underwater. An application for human control via electromyogram (EMG) signals also demonstrated an intuitive way for a person to operate the submerged robotic finger. Together, these results suggested that the soft robotic finger could be used to carefully manipulate fragile objects underwater.
水下抓取系统的设计、传感和控制仍然是软机器人操纵器面临的挑战。我们的研究通过为具有直接3D打印的可拉伸皮肤状触觉传感器的软机器人手指设计形状记忆合金(SMA)驱动系统,来研究这些关键问题。SMA致动器经过热机械训练,在焦耳加热时呈现出弯曲的手指状形状,并且柔性多层触觉传感器直接3D打印在指尖表面。开发了一种非线性控制器,利用柔顺触觉传感器的反馈实现精确的指尖力控制。利用来自直接3D打印触觉传感器和SMA致动器的闭环力反馈进行了水下实验,显示出令人满意的力跟踪能力。此外,还开发了一个3D有限元模型,以更深入地理解水下操纵器的形状记忆热流体结构多物理场模拟。通过肌电图(EMG)信号进行人体控制的应用也展示了一种让人们直观操作水下机器人手指的方式。这些结果共同表明,软机器人手指可用于在水下小心地操纵易碎物体。