Graduate Program in Neuroengineering, Edmond and Lily Safra International Institute of Neuroscience, Santos Dumont Institute, Macaíba 59280-000, Brazil.
Sensors (Basel). 2021 Sep 28;21(19):6477. doi: 10.3390/s21196477.
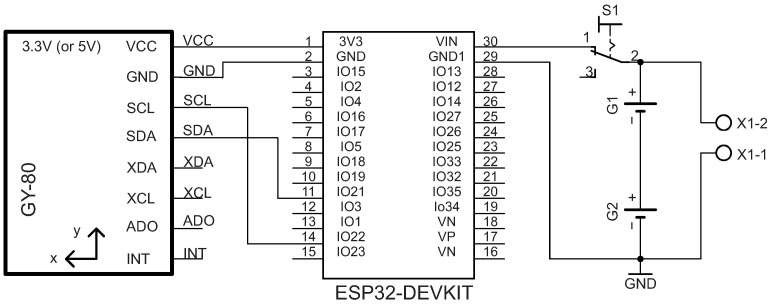
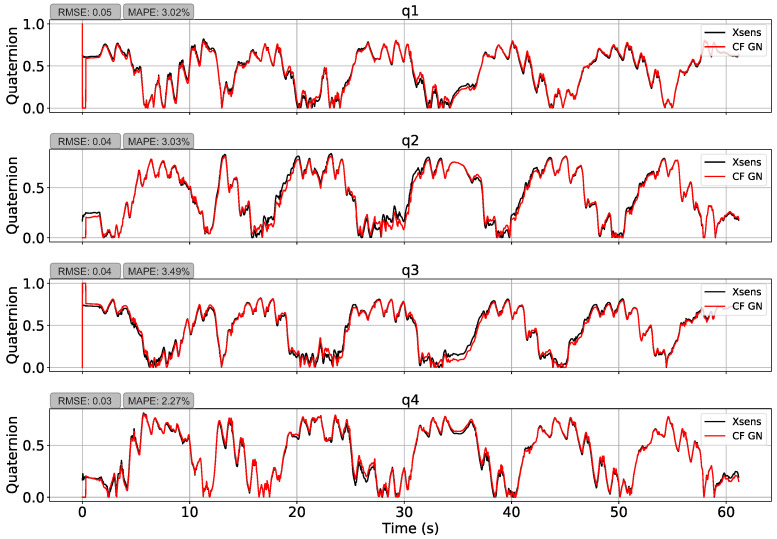
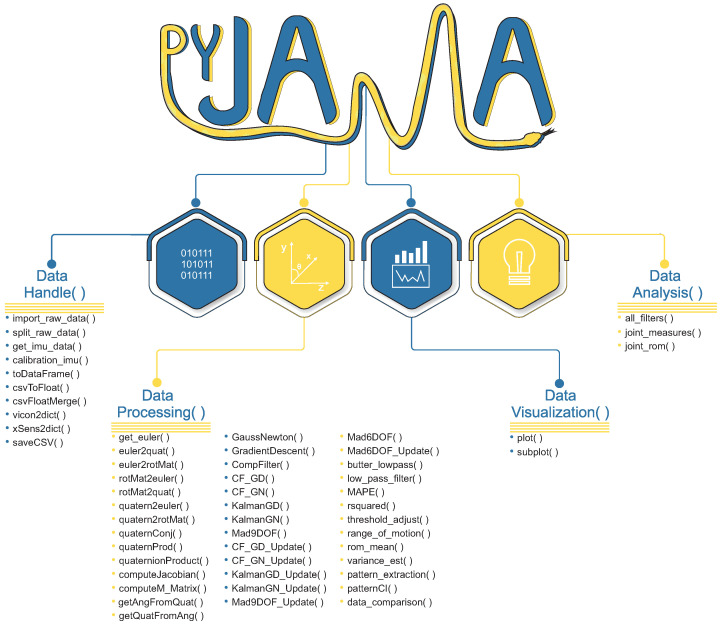
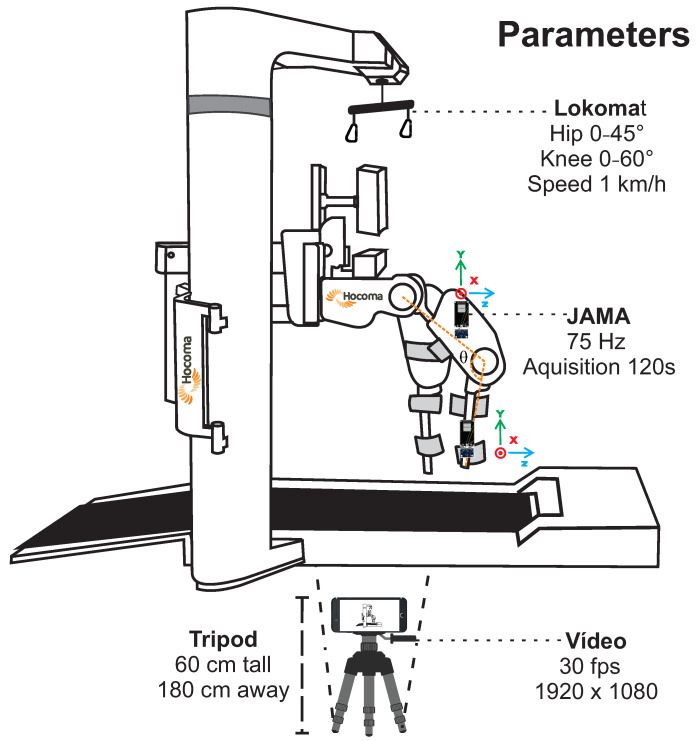
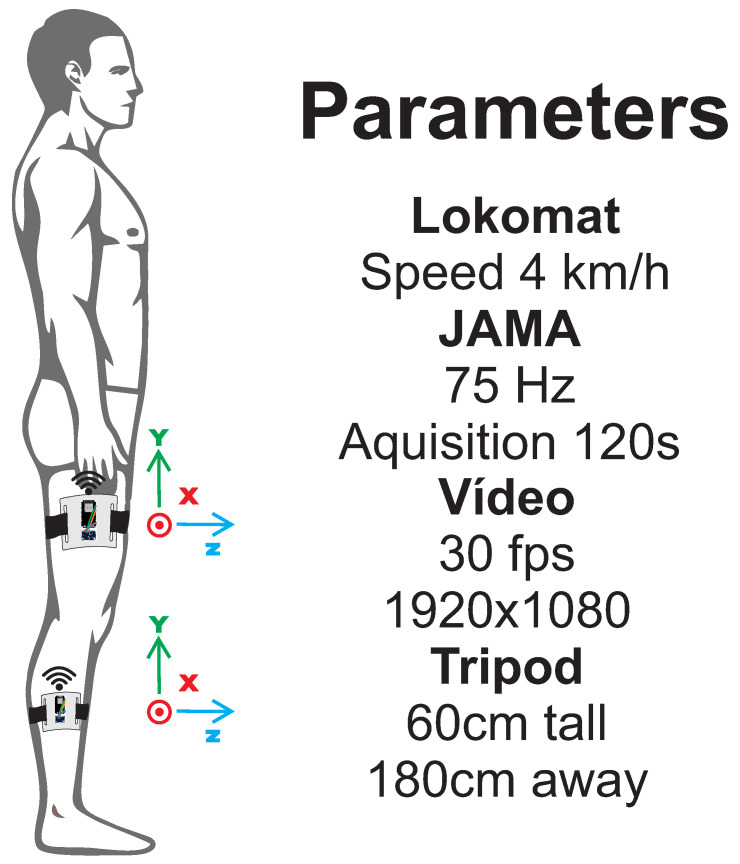
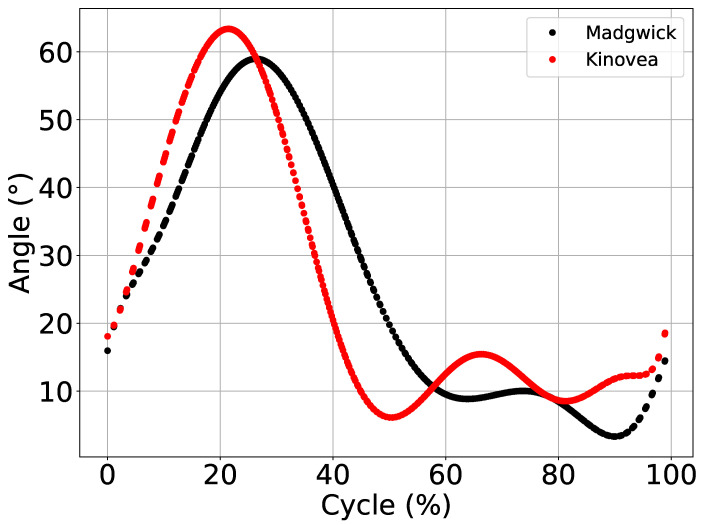
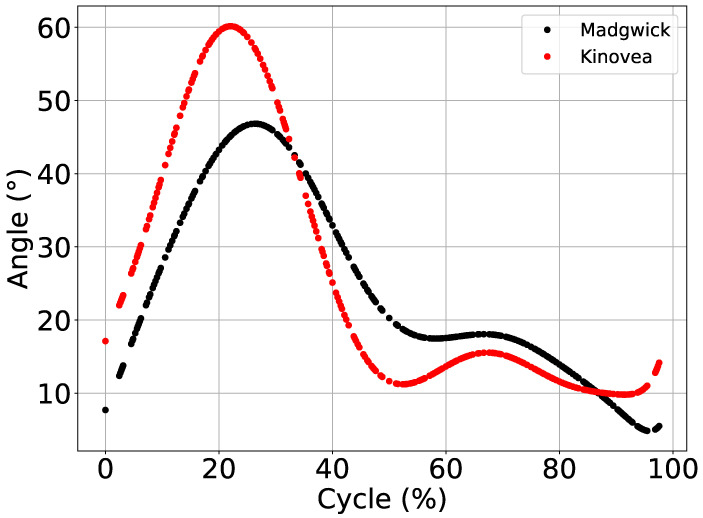
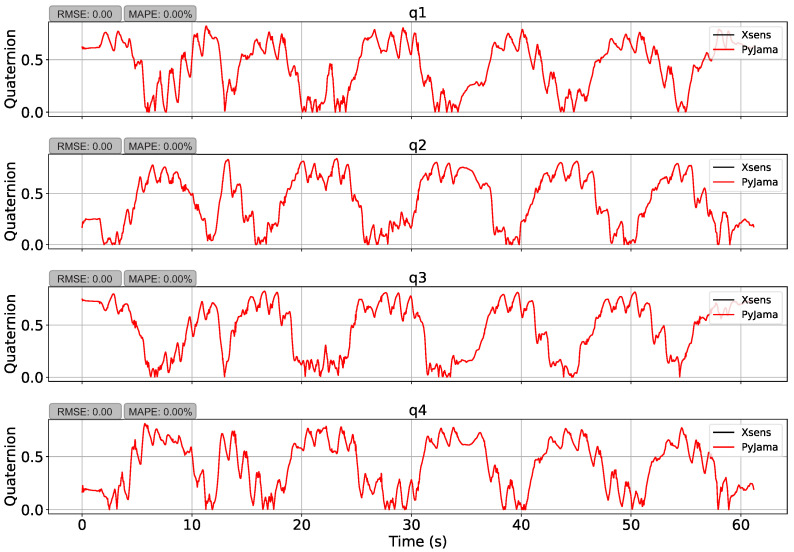
The use of inertial measurement units (IMUs) is a low-cost alternative for measuring joint angles. This study aims to present a low-cost open-source measurement system for joint angle estimation. The system is modular and has hardware and software. The hardware was developed using a low-cost IMU and microcontroller. The IMU data analysis software was developed in Python and has three fusion filters: Complementary Filter, Kalman Filter, and Madgwick Filter. Three experiments were performed for the proof of concept of the system. First, we evaluated the knee joint of Lokomat, with a predefined average range of motion (ROM) of 60∘. In the second, we evaluated our system in a real scenario, evaluating the knee of a healthy adult individual during gait. In the third experiment, we evaluated the software using data from gold standard devices, comparing the results of our software with Ground Truth. In the evaluation of the Lokomat, our system achieved an average ROM of 58.28∘, and during evaluation in a real scenario it achieved an average ROM of 44.62∘. In comparing our software with Ground Truth, we achieved a root-mean-square error of 0.04 and a mean average percentage error of 2.95%. These results encourage the use of this system in other scenarios.
惯性测量单元(IMU)的使用是测量关节角度的低成本替代方法。本研究旨在提出一种用于关节角度估计的低成本开源测量系统。该系统具有硬件和软件,是模块化的。硬件使用低成本的 IMU 和微控制器开发。IMU 数据分析软件是用 Python 开发的,具有三种融合滤波器:互补滤波器、卡尔曼滤波器和 Madgwick 滤波器。进行了三个实验来验证系统的概念验证。首先,我们评估了 Lokomat 的膝关节,其预定义的平均运动范围(ROM)为 60∘。其次,我们在真实场景中评估了我们的系统,评估了健康成年人在步态期间的膝关节。在第三个实验中,我们使用黄金标准设备的数据评估了该软件,将我们软件的结果与地面实况进行了比较。在对 Lokomat 的评估中,我们的系统实现了平均 ROM 为 58.28∘,在真实场景中的评估中,它实现了平均 ROM 为 44.62∘。在将我们的软件与地面实况进行比较时,我们实现了 0.04 的均方根误差和 2.95%的平均平均百分比误差。这些结果鼓励在其他场景中使用该系统。