Andrew and Peggy Cherng Department of Medical Engineering, Division of Engineering and Applied Science, California Institute of Technology, Pasadena, CA 91125, USA.
Sci Robot. 2022 Jun;7(67):eabn0495. doi: 10.1126/scirobotics.abn0495. Epub 2022 Jun 1.
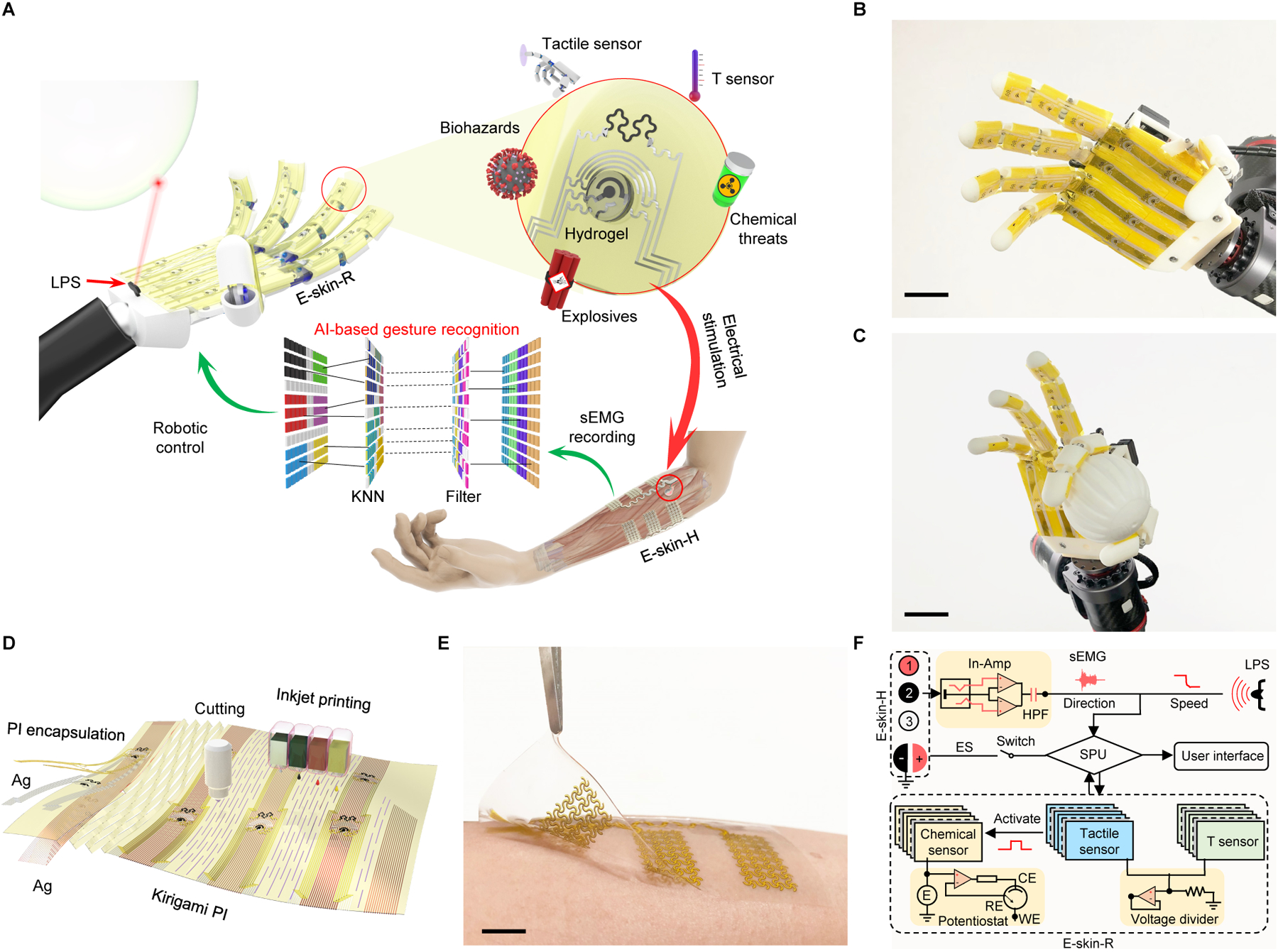
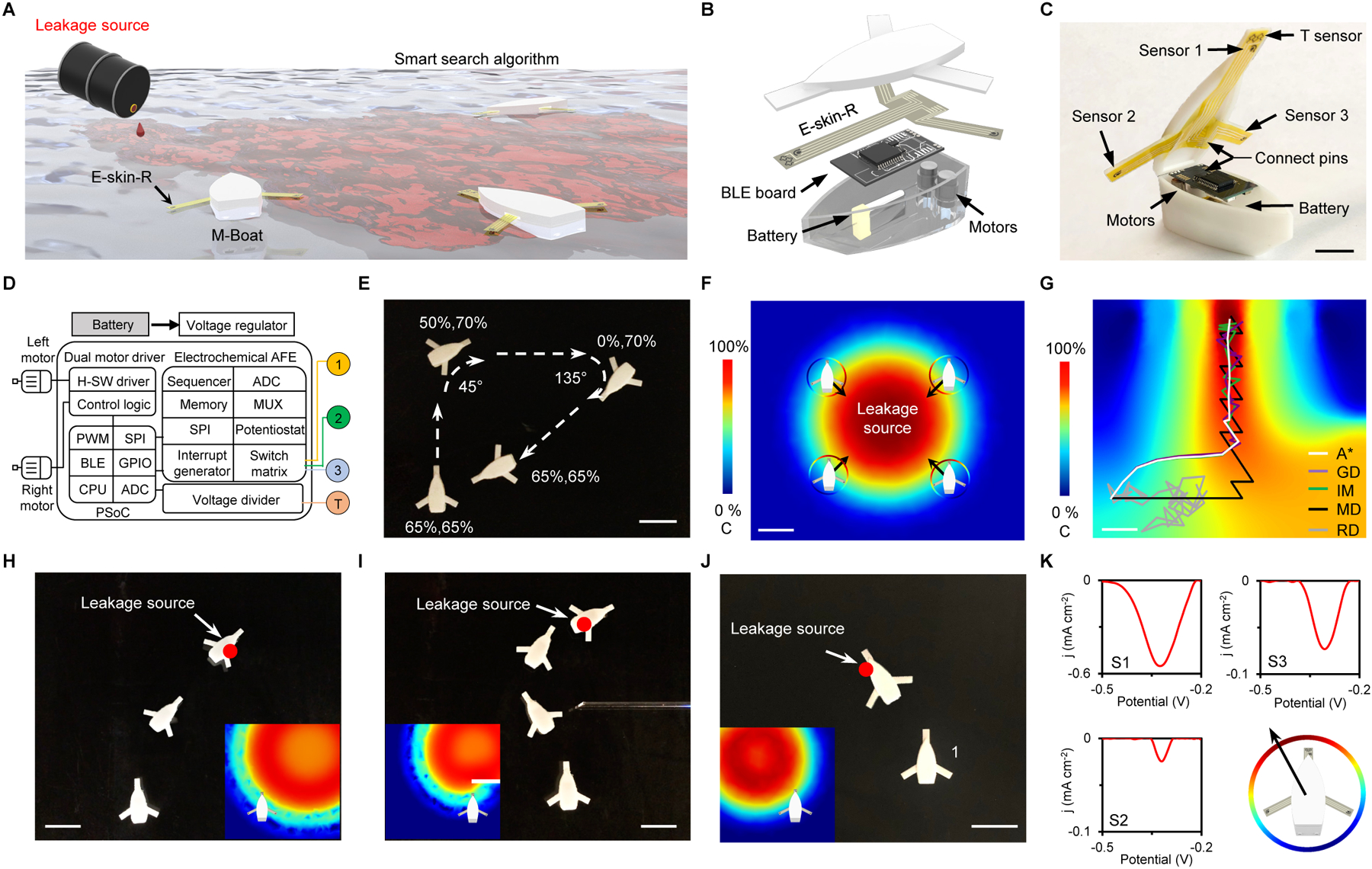
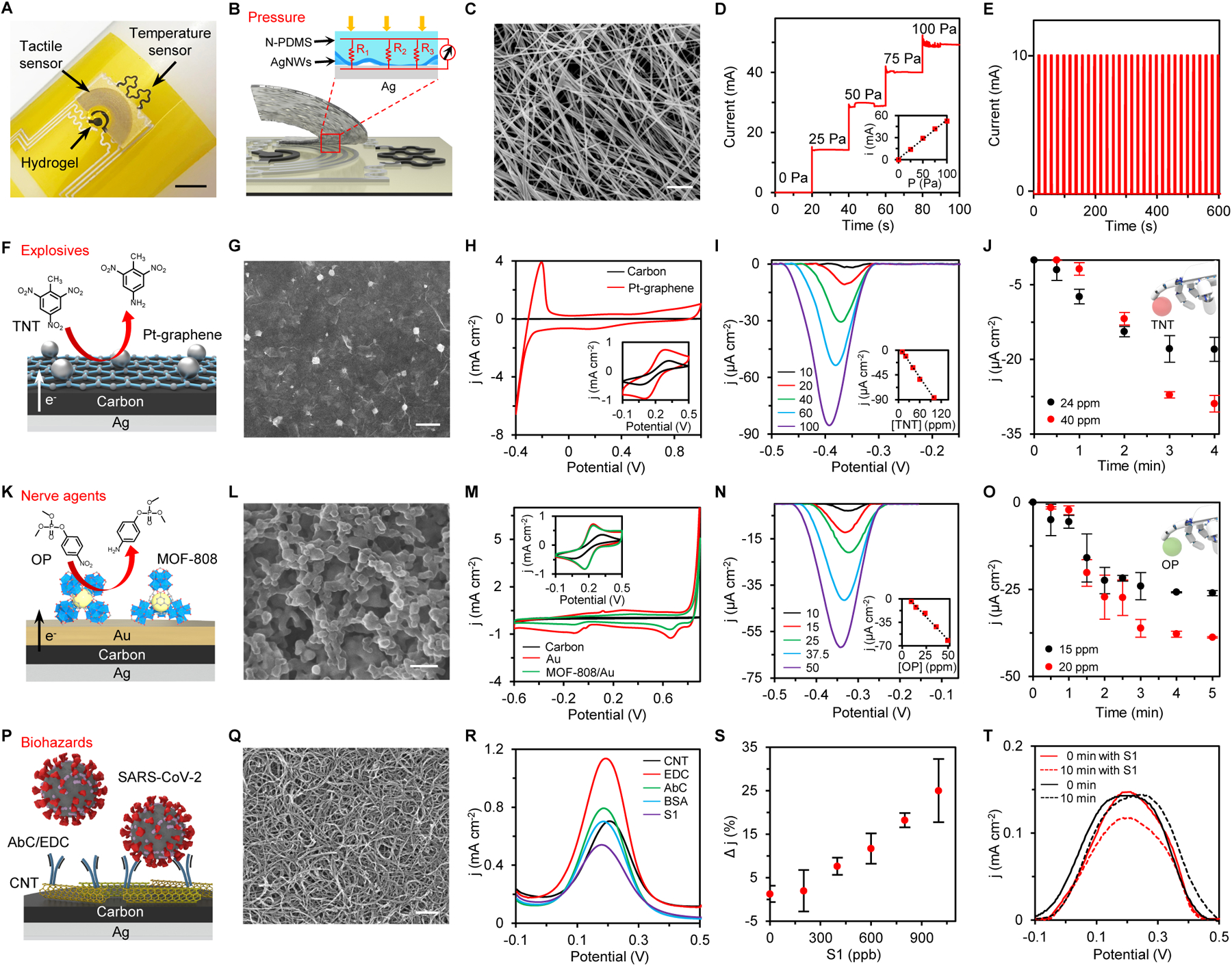
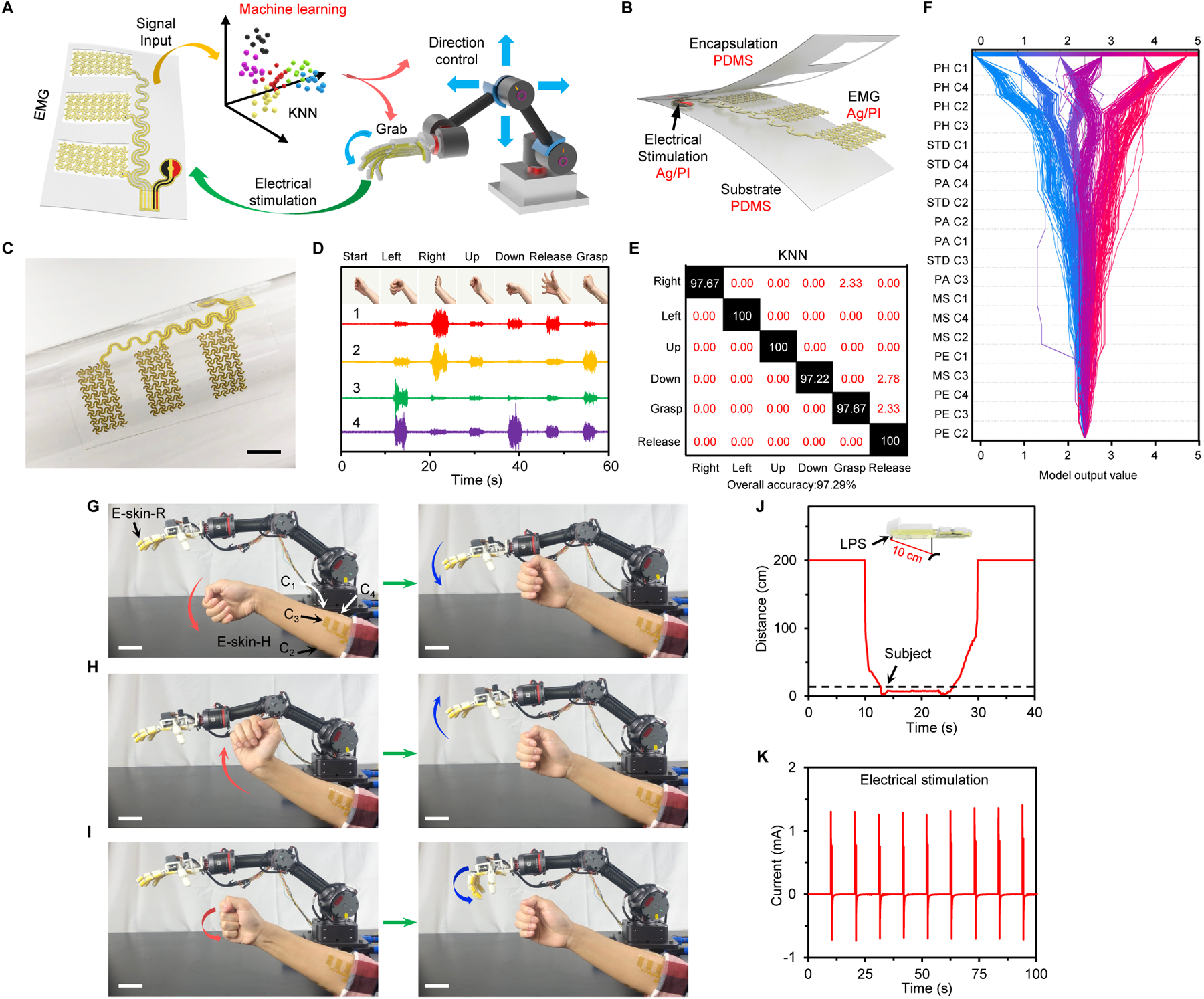
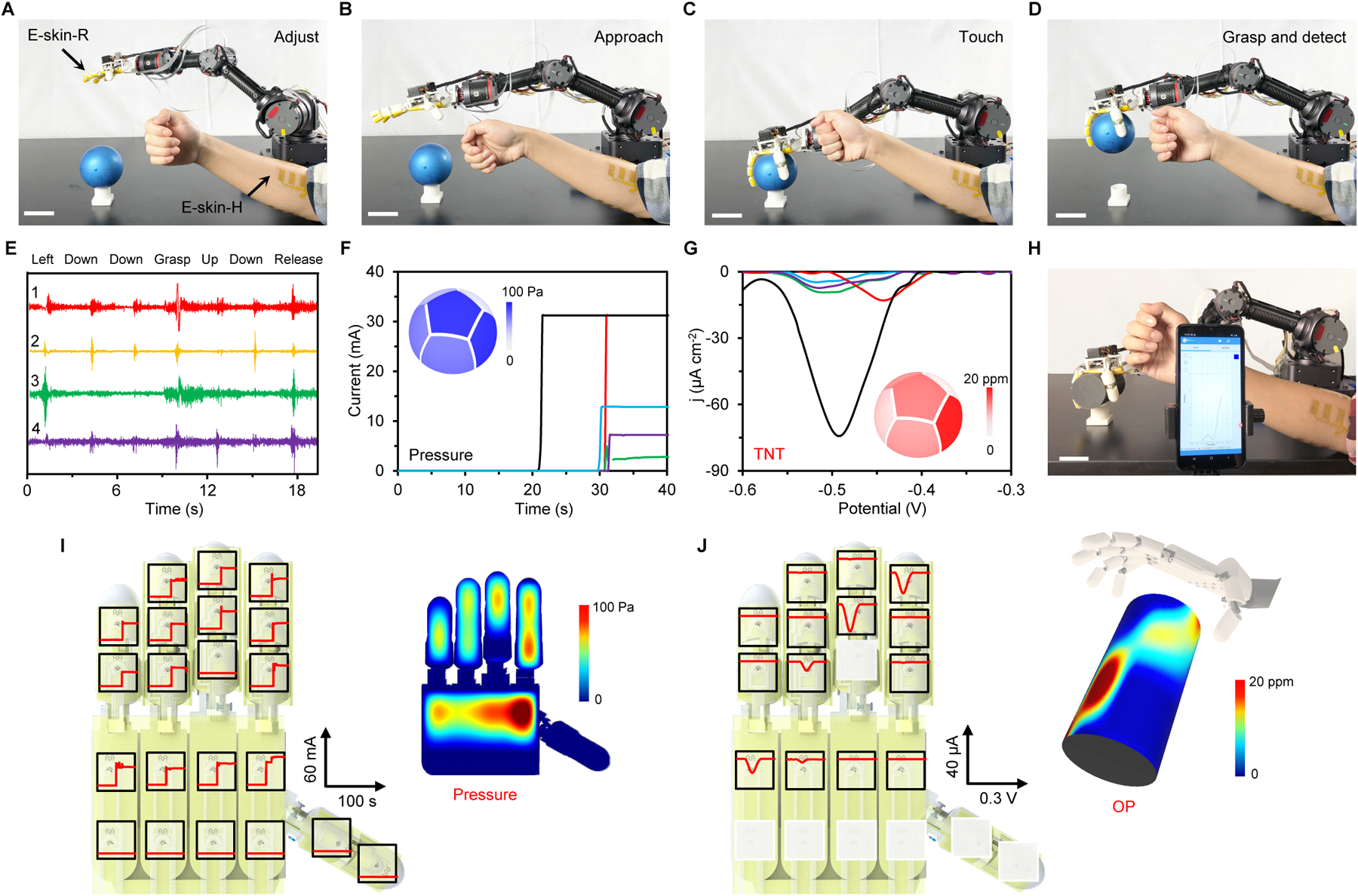
Ultrasensitive multimodal physicochemical sensing for autonomous robotic decision-making has numerous applications in agriculture, security, environmental protection, and public health. Previously reported robotic sensing technologies have primarily focused on monitoring physical parameters such as pressure and temperature. Integrating chemical sensors for autonomous dry-phase analyte detection on a robotic platform is rather extremely challenging and substantially underdeveloped. Here, we introduce an artificial intelligence-powered multimodal robotic sensing system (M-Bot) with an all-printed mass-producible soft electronic skin-based human-machine interface. A scalable inkjet printing technology with custom-developed nanomaterial inks was used to manufacture flexible physicochemical sensor arrays for electrophysiology recording, tactile perception, and robotic sensing of a wide range of hazardous materials including nitroaromatic explosives, pesticides, nerve agents, and infectious pathogens such as SARS-CoV-2. The M-Bot decodes the surface electromyography signals collected from the human body through machine learning algorithms for remote robotic control and can perform in situ threat compound detection in extreme or contaminated environments with user-interactive tactile and threat alarm feedback. The printed electronic skin-based robotic sensing technology can be further generalized and applied to other remote sensing platforms. Such diversity was validated on an intelligent multimodal robotic boat platform that can efficiently track the source of trace amounts of hazardous compounds through autonomous and intelligent decision-making algorithms. This fully printed human-machine interactive multimodal sensing technology could play a crucial role in designing future intelligent robotic systems and can be easily reconfigured toward numerous practical wearable and robotic applications.
用于自主机器人决策的超高灵敏多模态物理化学传感在农业、安全、环境保护和公共卫生等领域有诸多应用。先前报道的机器人传感技术主要集中于监测压力和温度等物理参数。在机器人平台上集成用于自主干式分析物检测的化学传感器极具挑战性且尚未得到充分发展。在此,我们引入了一种人工智能驱动的多模态机器人传感系统(M-Bot),它具有基于全印刷、可大规模生产的软电子皮肤的人机接口。我们使用定制开发的纳米材料油墨的可扩展喷墨打印技术来制造用于电生理学记录、触觉感知以及对包括硝基芳香族炸药、农药、神经毒剂和 SARS-CoV-2 等传染性病原体在内的各种危险材料的机器人传感的柔性物理化学传感器阵列。M-Bot 通过机器学习算法对从人体收集的表面肌电图信号进行解码,用于远程机器人控制,并且可以在极端或污染环境中进行原位威胁化合物检测,具有用户交互的触觉和威胁警报反馈。基于印刷电子皮肤的机器人传感技术可以进一步推广并应用于其他遥感平台。在智能多模态机器人船平台上验证了这种多样性,该平台可以通过自主和智能决策算法有效地追踪痕量危险化合物的来源。这种完全印刷的人机交互多模态传感技术在设计未来智能机器人系统方面可以发挥关键作用,并且可以轻松地重新配置以适应众多实际的可穿戴和机器人应用。