School of Aerospace, Transport and Manufacturing, Cranfield University, Bedford MK43 0AL, UK.
Network Rail, Milton Keynes MK9 1EN, UK.
Sensors (Basel). 2022 May 31;22(11):4185. doi: 10.3390/s22114185.
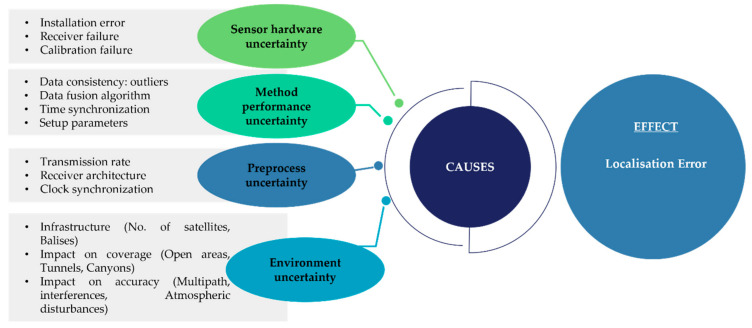
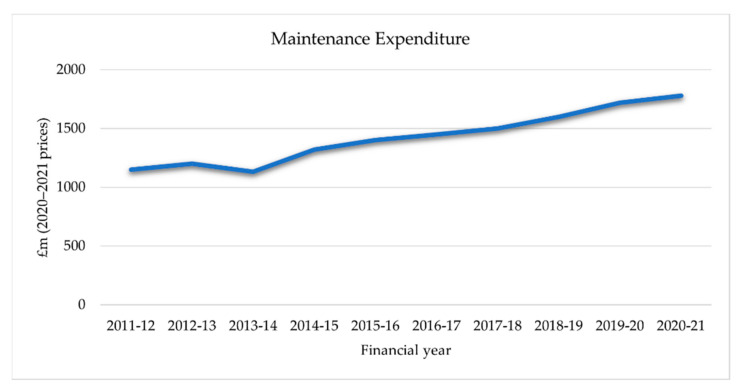
Smart maintenance is essential to achieving a safe and reliable railway, but traditional maintenance deployment is costly and heavily human-involved. Ineffective job execution or failure in preventive maintenance can lead to railway service disruption and unsafe operations. The deployment of robotic and autonomous systems was proposed to conduct these maintenance tasks with higher accuracy and reliability. In order for these systems to be capable of detecting rail flaws along millions of mileages they must register their location with higher accuracy. A prerequisite of an autonomous vehicle is its possessing a high degree of accuracy in terms of its positional awareness. This paper first reviews the importance and demands of preventive maintenance in railway networks and the related techniques. Furthermore, this paper investigates the strategies, techniques, architecture, and references used by different systems to resolve the location along the railway network. Additionally, this paper discusses the advantages and applicability of on-board-based and infrastructure-based sensing, respectively. Finally, this paper analyses the uncertainties which contribute to a vehicle's position error and influence on positioning accuracy and reliability with corresponding technique solutions. This study therefore provides an overall direction for the development of further autonomous track-based system designs and methods to deal with the challenges faced in the railway network.
智能维护对于实现安全可靠的铁路至关重要,但传统的维护部署成本高昂且高度依赖人工。作业执行不力或预防性维护失败可能导致铁路服务中断和运营不安全。因此,提出了机器人和自主系统的部署来更准确、更可靠地执行这些维护任务。为了使这些系统能够检测到数百万英里长的铁轨缺陷,它们必须以更高的精度记录其位置。自动驾驶车辆的前提是其在位置感知方面具有高度的准确性。本文首先回顾了铁路网络中预防性维护的重要性和需求以及相关技术。此外,本文研究了不同系统用于解决铁路网络中位置问题的策略、技术、架构和参考。此外,本文还分别讨论了基于车载和基于基础设施的传感的优点和适用性。最后,本文分析了导致车辆位置误差的不确定性及其对定位精度和可靠性的影响,并提出了相应的技术解决方案。因此,本研究为进一步开发基于轨道的自主系统设计和方法提供了总体方向,以应对铁路网络中面临的挑战。