Secciani Nicola, Brogi Chiara, Pagliai Marco, Buonamici Francesco, Gerli Filippo, Vannetti Federica, Bianchini Massimo, Volpe Yary, Ridolfi Alessandro
Department of Industrial Engineering, University of Florence, Firenze, Italy.
IRCCS Don Gnocchi, Don Carlo Gnocchi Foundation, Firenze, Italy.
Front Neurorobot. 2021 Oct 21;15:750385. doi: 10.3389/fnbot.2021.750385. eCollection 2021.
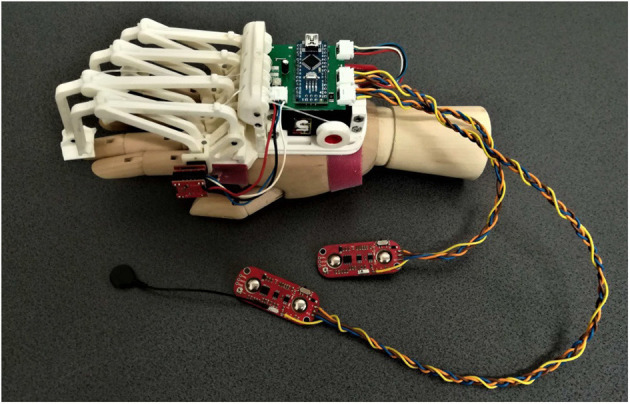
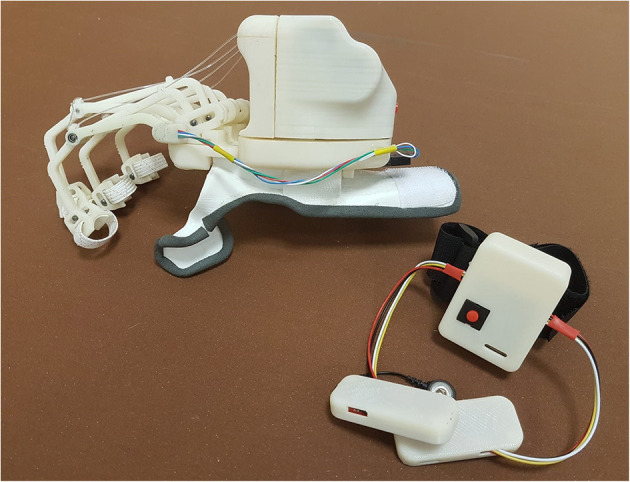
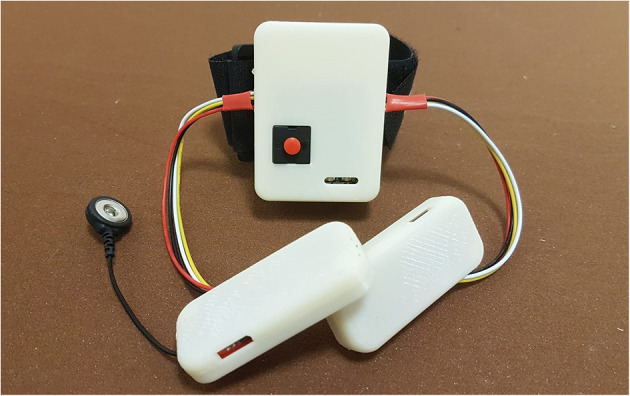
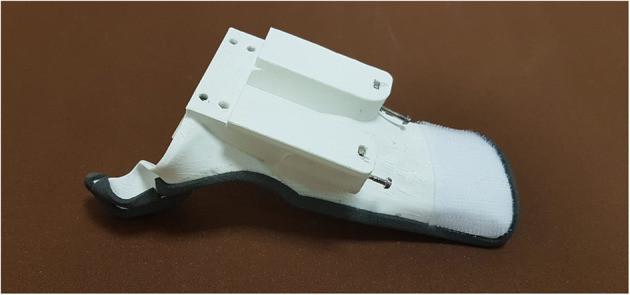
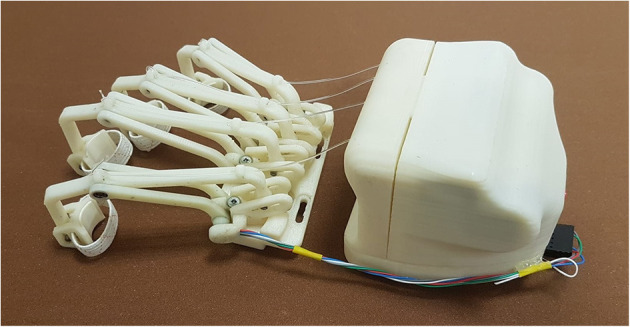
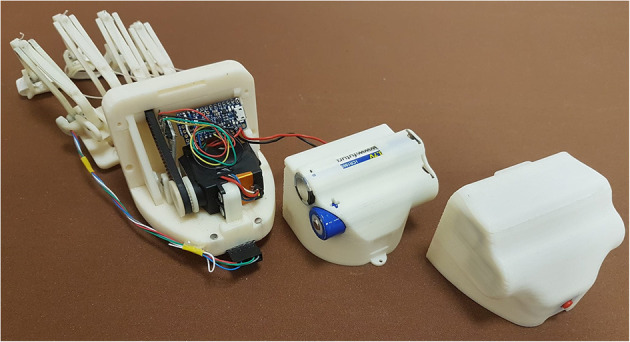
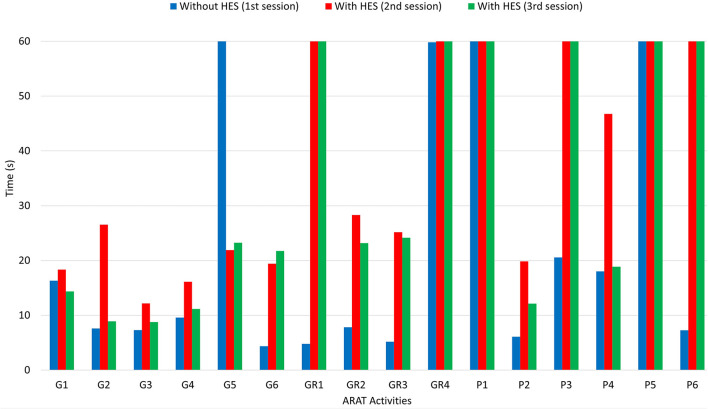
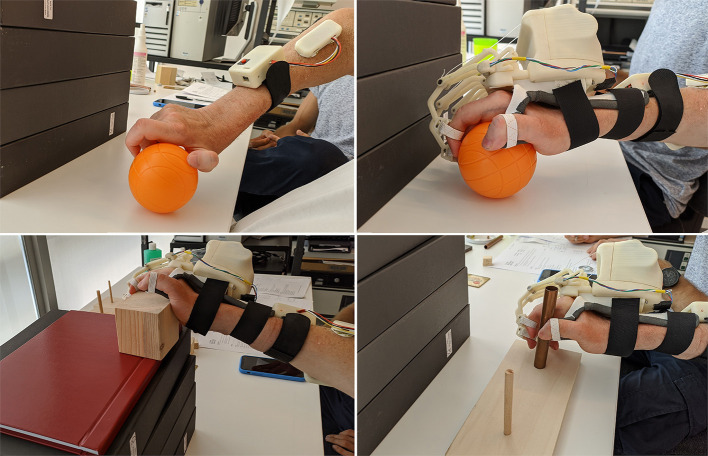
Robotic devices are being employed in more and more sectors to enhance, streamline, and augment the outcomes of a wide variety of human activities. Wearable robots arise indeed as of-vital-importance tools for telerehabilitation or home assistance targeting people affected by motor disabilities. In particular, the field of "Robotics for Medicine and Healthcare" is attracting growing interest. The development of such devices is a primarily addressed topic since the increasing number of people in need of rehabilitation or assistive therapies (due to population aging) growingly weighs on the healthcare systems of the nation. Besides, the necessity to move to clinics represents an additional logistic burden for patients and their families. Among the various body parts, the hand is specially investigated since it most ensures the independence of an individual, and thus, the restoration of its dexterity is considered a high priority. In this study, the authors present the development of a fully wearable, portable, and tailor-made hand exoskeleton designed for both home assistance and telerehabilitation. Its purpose is either to assist patients during activities of daily living by running a real-time intention detection algorithm or to be used for remotely supervised or unsupervised rehabilitation sessions by performing exercises preset by therapists. Throughout the mechatronic design process, special attention has been paid to the complete wearability and comfort of the system to produce a user-friendly device capable of assisting people in their daily life or enabling recorded home rehabilitation sessions allowing the therapist to monitor the state evolution of the patient. Such a hand exoskeleton system has been designed, manufactured, and preliminarily tested on a subject affected by spinal muscular atrophy, and some results are reported at the end of the article.
机器人设备正被应用于越来越多的领域,以提升、简化并增强各种人类活动的成果。可穿戴机器人确实已成为远程康复或针对行动不便者的家庭援助的至关重要的工具。特别是,“医学与医疗保健机器人技术”领域正吸引着越来越多的关注。由于需要康复或辅助治疗的人数不断增加(归因于人口老龄化),给国家的医疗系统带来了越来越大的负担,此类设备的开发成为一个首要关注的主题。此外,前往诊所就诊的必要性给患者及其家人带来了额外的后勤负担。在身体的各个部位中,手部受到了特别研究,因为它最能确保个人的独立性,因此,恢复其灵活性被视为高度优先事项。在本研究中,作者展示了一种专为家庭援助和远程康复设计的完全可穿戴、便携式且量身定制的手部外骨骼的开发情况。其目的要么是通过运行实时意图检测算法在日常生活活动中协助患者,要么是通过执行治疗师预设的练习用于远程监督或无监督的康复疗程。在整个机电一体化设计过程中,特别关注了系统的完全可穿戴性和舒适性,以生产出一种用户友好型设备,该设备能够在日常生活中协助人们,或者实现可记录的家庭康复疗程,使治疗师能够监测患者的状态变化。这样一种手部外骨骼系统已经设计、制造并在一名脊髓性肌萎缩症患者身上进行了初步测试,文章结尾报告了一些结果。