Soleimani Parastoo, Capson David W, Li Kin Fun
Department of Electrical and Computer Engineering, University of Victoria, Victoria, BC V8W 2Y2 Canada.
J Real Time Image Process. 2021;18(6):2123-2134. doi: 10.1007/s11554-021-01089-9. Epub 2021 Mar 29.
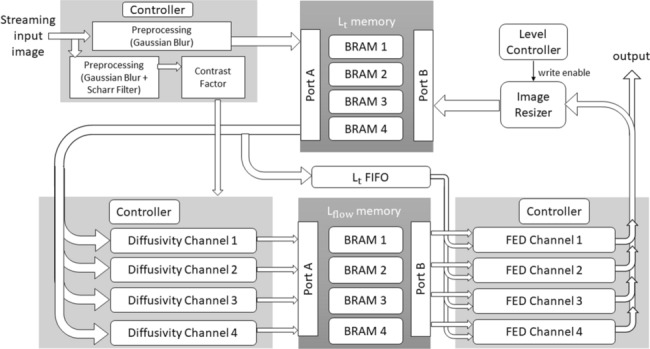
The first step in a scale invariant image matching system is scale space generation. Nonlinear scale space generation algorithms such as AKAZE, reduce noise and distortion in different scales while retaining the borders and key-points of the image. An FPGA-based hardware architecture for AKAZE nonlinear scale space generation is proposed to speed up this algorithm for real-time applications. The three contributions of this work are (1) mapping the two passes of the AKAZE algorithm onto a hardware architecture that realizes parallel processing of multiple sections, (2) multi-scale line buffers which can be used for different scales, and (3) a time-sharing mechanism in the memory management unit to process multiple sections of the image in parallel. We propose a time-sharing mechanism for memory management to prevent artifacts as a result of separating the process of image partitioning. We also use approximations in the algorithm to make hardware implementation more efficient while maintaining the repeatability of the detection. A frame rate of 304 frames per second for a image resolution is achieved which is favorably faster in comparison with other work.
尺度不变图像匹配系统的第一步是尺度空间生成。诸如AKAZE之类的非线性尺度空间生成算法,在保留图像边界和关键点的同时,能在不同尺度下减少噪声和失真。本文提出了一种基于现场可编程门阵列(FPGA)的用于AKAZE非线性尺度空间生成的硬件架构,以加速该算法用于实时应用。这项工作的三个贡献在于:(1)将AKAZE算法的两次遍历映射到一个实现多段并行处理的硬件架构上;(2)可用于不同尺度的多尺度行缓冲器;(3)内存管理单元中的分时机制,以并行处理图像的多个部分。我们提出了一种用于内存管理的分时机制,以防止因图像分割过程分离而产生的伪像。我们还在算法中使用近似值,以便在保持检测可重复性的同时,提高硬件实现的效率。对于图像分辨率,实现了每秒304帧的帧率,与其他工作相比,这一帧率要快得多。