Saito Tsuyoshi, Ogihara Naomichi, Takei Tomohiko, Seki Kazuhiko
Department of Mechanical Engineering, Faculty of Science and Technology, Keio University, Yokohama, Japan.
Department of Biological Sciences, Graduate School of Science, The University of Tokyo, Tokyo, Japan.
Front Syst Neurosci. 2021 Dec 8;15:774596. doi: 10.3389/fnsys.2021.774596. eCollection 2021.
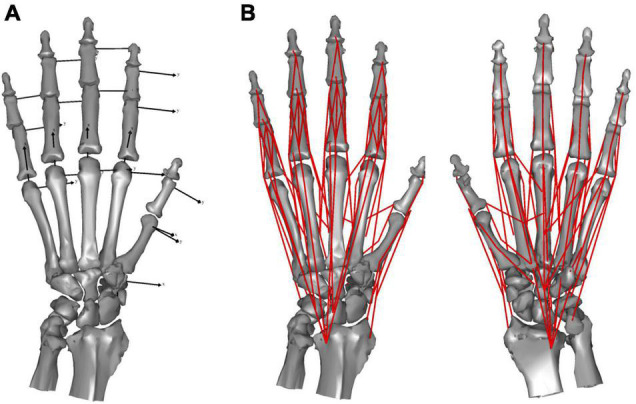
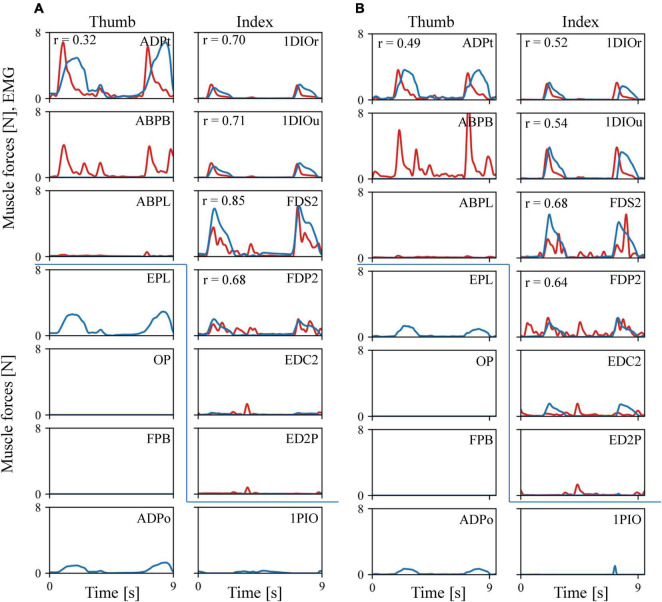
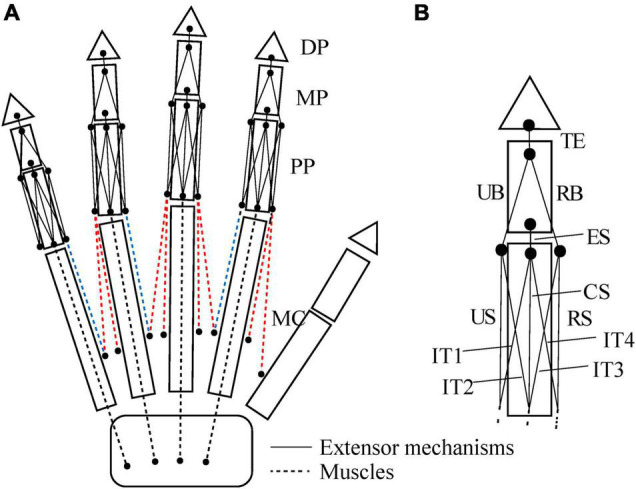
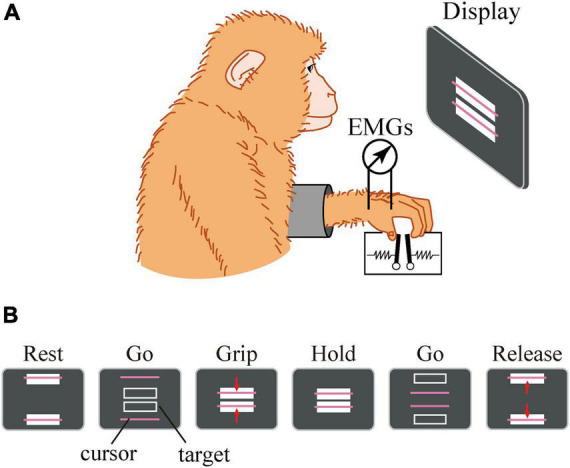
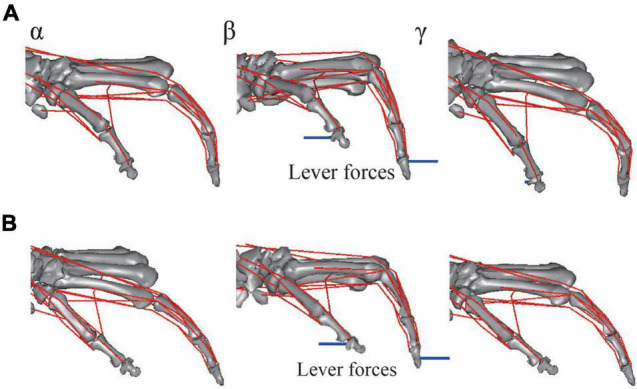
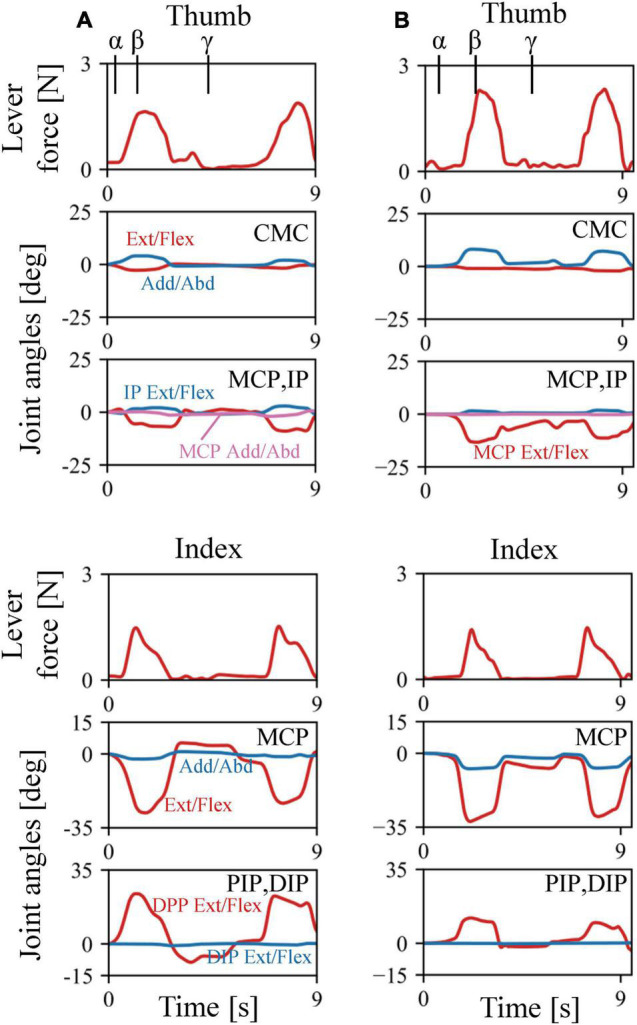
Toward clarifying the biomechanics and neural mechanisms underlying coordinated control of the complex hand musculoskeletal system, we constructed an anatomically based musculoskeletal model of the Japanese macaque () hand, and then estimated the muscle force of all the hand muscles during a precision grip task using inverse dynamic calculation. The musculoskeletal model was constructed from a computed tomography scan of one adult male macaque cadaver. The hand skeleton was modeled as a chain of rigid links connected by revolute joints. The path of each muscle was defined as a series of points connected by line segments. Using this anatomical model and a model-based matching technique, we constructed 3D hand kinematics during the precision grip task from five simultaneous video recordings. Specifically, we collected electromyographic and kinematic data from one adult male Japanese macaque during the precision grip task and two sequences of the precision grip task were analyzed based on inverse dynamics. Our estimated muscular force patterns were generally in agreement with simultaneously measured electromyographic data. Direct measurement of muscle activations for all the muscles involved in the precision grip task is not feasible, but the present inverse dynamic approach allows estimation for all the hand muscles. Although some methodological limitations certainly exist, the constructed model analysis framework has potential in clarifying the biomechanics and neural control of manual dexterity in macaques and humans.
为了阐明复杂手部肌肉骨骼系统协调控制背后的生物力学和神经机制,我们构建了基于日本猕猴手部解剖结构的肌肉骨骼模型,然后使用逆动力学计算估计了精确抓握任务期间所有手部肌肉的肌力。该肌肉骨骼模型是根据一只成年雄性猕猴尸体的计算机断层扫描构建的。手部骨骼被建模为由旋转关节连接的一系列刚性连杆。每块肌肉的路径被定义为由线段连接的一系列点。利用这个解剖模型和基于模型的匹配技术,我们从五个同步视频记录中构建了精确抓握任务期间的三维手部运动学。具体来说,我们在精确抓握任务期间收集了一只成年雄性日本猕猴的肌电图和运动学数据,并基于逆动力学分析了精确抓握任务的两个序列。我们估计的肌肉力模式总体上与同时测量的肌电图数据一致。直接测量精确抓握任务中涉及的所有肌肉的激活情况是不可行的,但目前的逆动力学方法允许对所有手部肌肉进行估计。尽管肯定存在一些方法上的局限性,但构建的模型分析框架在阐明猕猴和人类手部灵巧性的生物力学和神经控制方面具有潜力。