Department of Mechanical Engineering, Faculty of Science and Technology, Keio University, Yokohama, 223-8522, Japan.
Artificial Intelligence Research Center, National Institute of Advanced Industrial Science and Technology (AIST), Tokyo, 135-0064, Japan.
Sci Rep. 2022 Aug 2;12(1):13247. doi: 10.1038/s41598-022-16962-1.
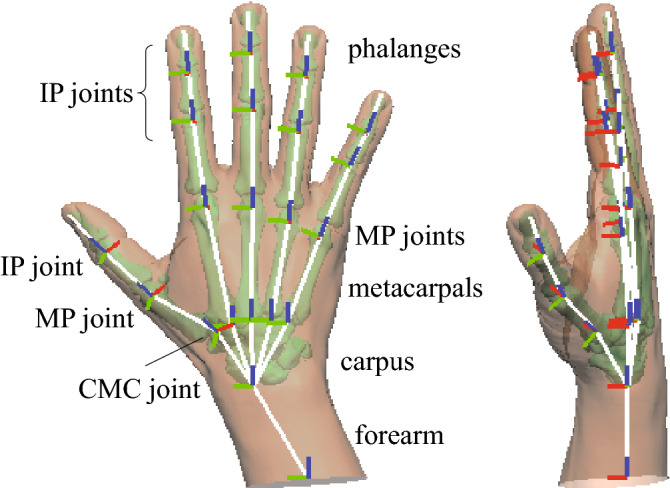
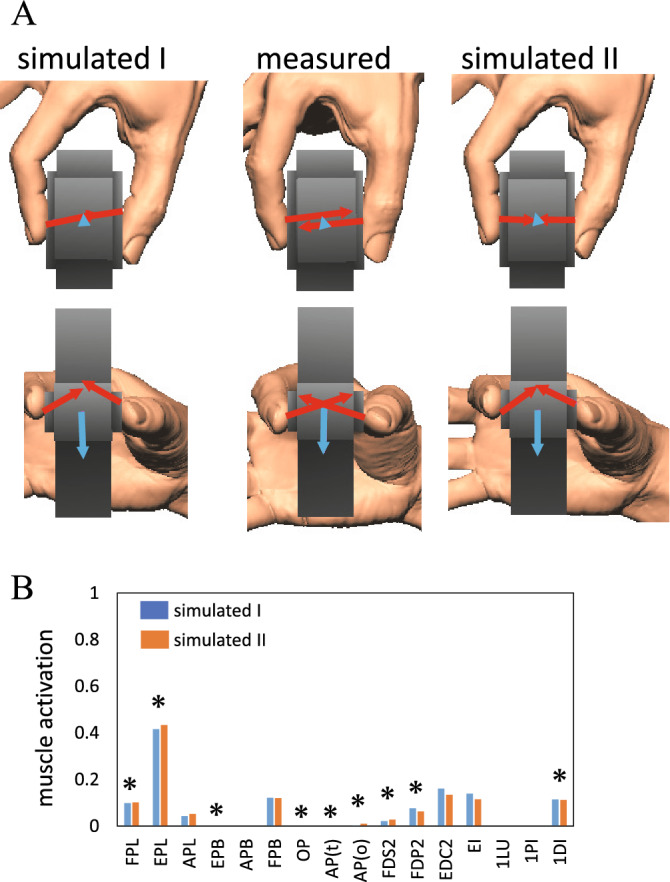
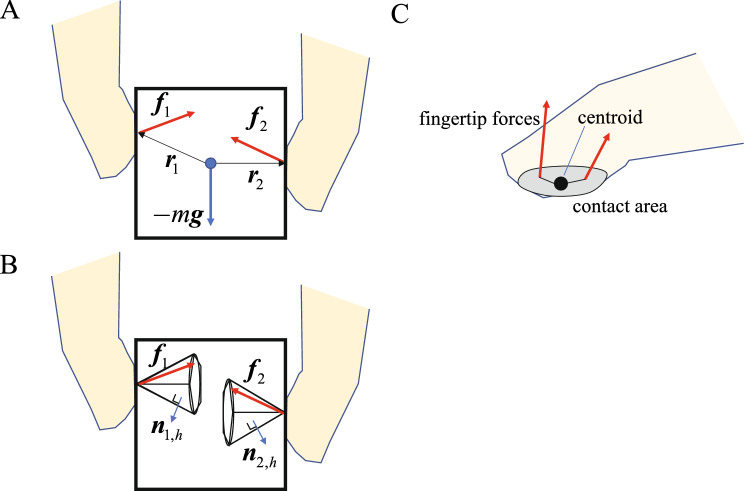
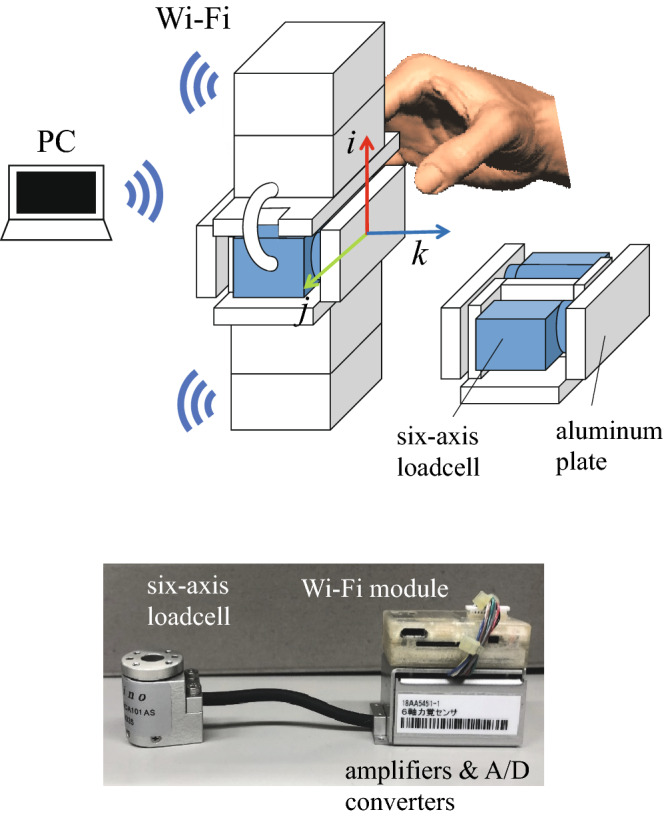
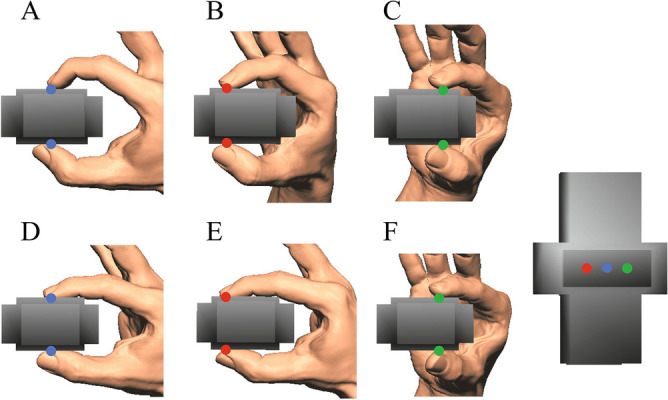
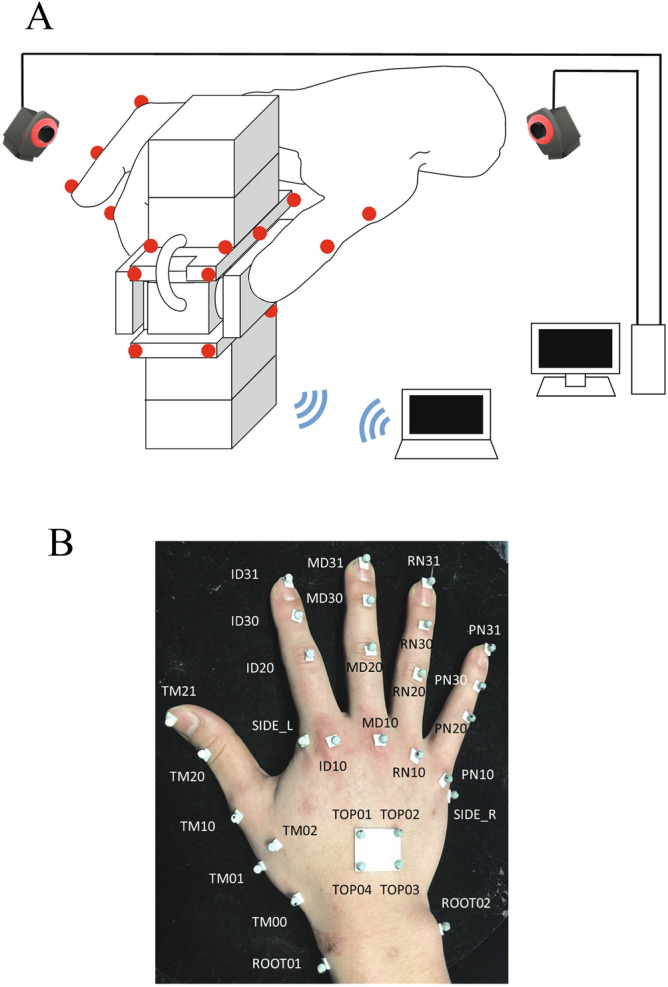
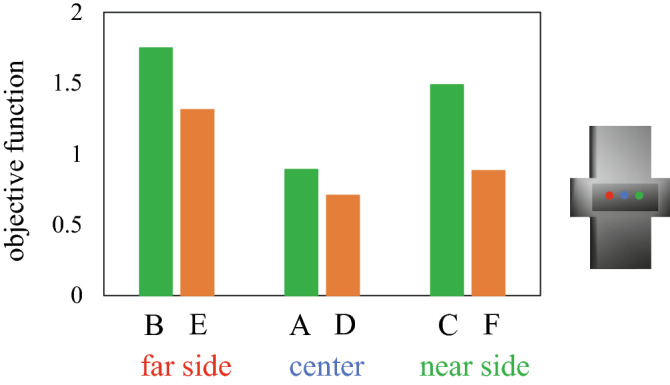
We developed a method to estimate a biomechanically feasible precision grip posture of the human hand for a given object based on a minimization of the muscle effort. The hand musculoskeletal model was constructed as a chain of 21 rigid links with 37 intrinsic and extrinsic muscles. To grasp an object, the static force and moment equilibrium condition of the object, force balance between the muscle and fingertip forces, and static frictional conditions must be satisfied. We calculated the hand posture, fingertip forces, and muscle activation signals for a given object to minimize the square sum of the muscle activations while satisfying the above kinetic constraints using an evolutionary optimization technique. To evaluate the estimated hand posture and fingertip forces, a wireless fingertip force-sensing device with two six-axis load cells was developed. When grasping the object, the fingertip forces and hand posture were experimentally measured to compare with the corresponding estimated values. The estimated hand postures and fingertip forces were in reasonable agreement to the corresponding measured data, indicating that the proposed hand posture estimation method based on the minimization of muscle effort is effective for the virtual ergonomic assessment of a handheld product.
我们开发了一种方法,可基于肌肉做功最小化来估计给定物体的人手生物力学可行的精确抓握姿势。手部骨骼肌肉模型构建为 21 个刚性连杆的链,具有 37 个内在和外在肌肉。为了抓取物体,必须满足物体的静力平衡条件和力矩平衡条件、肌肉和指尖力之间的力平衡以及静摩擦力条件。我们使用进化优化技术计算了给定物体的手姿势、指尖力和肌肉激活信号,以在满足上述运动学约束的情况下最小化肌肉激活的平方和。为了评估估计的手姿势和指尖力,开发了一种具有两个六轴测力传感器的无线指尖力感测装置。在抓取物体时,实验测量了指尖力和手姿势,并将其与相应的估计值进行比较。估计的手姿势和指尖力与相应的测量数据吻合良好,表明基于肌肉做功最小化的手姿势估计方法对于手持产品的虚拟人体工程学评估是有效的。