School of Electronics and Information Engineering, Korea Aerospace University, Goyang 10540, Korea.
Sensors (Basel). 2022 Jan 18;22(3):723. doi: 10.3390/s22030723.
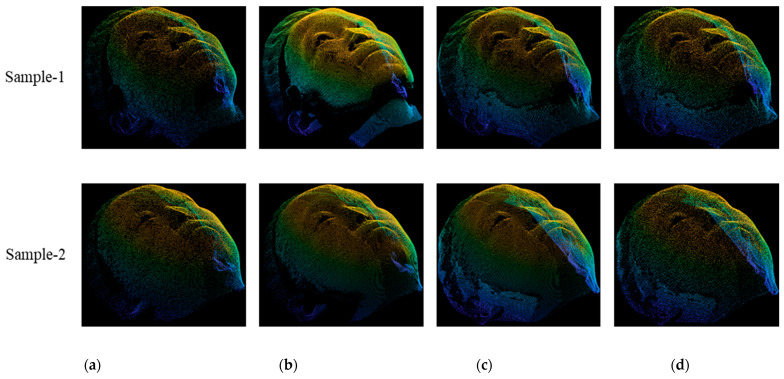
Owing to imperfect scans, occlusions, low reflectance of the scanned surface, and packet loss, there may be several incomplete regions in the 3D point cloud dataset. These missing regions can degrade the performance of recognition, classification, segmentation, or upsampling methods in point cloud datasets. In this study, we propose a new approach to estimate the incomplete regions of 3D point cloud human face datasets using the masking method. First, we perform some preprocessing on the input point cloud, such as rotation in the left and right angles. Then, we project the preprocessed point cloud onto a 2D surface and generate masks. Finally, we interpolate the 2D projection and the mask to produce the estimated point cloud. We also designed a deep learning model to restore the estimated point cloud to improve its quality. We use chamfer distance (CD) and hausdorff distance (HD) to evaluate the proposed method on our own human face and large-scale facial model (LSFM) datasets. The proposed method achieves an average CD and HD results of 1.30 and 21.46 for our own and 1.35 and 9.08 for the LSFM datasets, respectively. The proposed method shows better results than the existing methods.
由于扫描不完整、遮挡、扫描表面反射率低以及数据包丢失,三维点云数据集可能存在几个不完整区域。这些缺失的区域会降低识别、分类、分割或点云数据集上采样方法的性能。在这项研究中,我们提出了一种使用掩模方法估计三维点云人脸数据集不完整区域的新方法。首先,我们对点云进行一些预处理,例如左右角度旋转。然后,我们将预处理后的点云投影到二维表面并生成掩模。最后,我们对二维投影和掩模进行插值,生成估计的点云。我们还设计了一个深度学习模型来恢复估计的点云,以提高其质量。我们使用 Chamfer 距离 (CD) 和 Hausdorff 距离 (HD) 来评估我们自己的人脸和大规模人脸模型 (LSFM) 数据集上的建议方法。该方法在我们自己的数据集上的平均 CD 和 HD 结果分别为 1.30 和 21.46,在 LSFM 数据集上的平均 CD 和 HD 结果分别为 1.35 和 9.08。该方法的结果优于现有的方法。